作者

Alec Makdessian
Alec现任恩智浦的市场与应用总监,负责管理面向工业应用的模拟ASSP。他在半导体行业拥有20年的经验,曾任应用工程师、市场工程师、业务经理、总监及执行总监等不同职务。他的技术专长涵盖射频、数据转换和传感器领域。Alec拥有得克萨斯大学奥斯汀分校的电气工程学士学位和硕士学位。

如果说摄像头、激光雷达和IMU构成了机器人的眼睛与内耳,那么精密模拟测量便是它的“本体感知”——这种悄无声息的感知能力能够察觉到电流、应力和温度,让您洞悉其真实运行状态。
在众多实现这一感知能力的组件中,NAFEB43388可谓出类拔萃。它是一款稳健的多通道模拟前端(AFE),具备8个可配置输入(最高支持±25V)、一个24位Δ-Σ模数转换器(ADC)、内置可编程增益放大器(PGA)、面向电阻型传感器的激励源,以及坚固可靠的电磁兼容(EMC)与防错接保护。所有这些特性,均为实现工业级精度与韧性而设计。
它不是摄像头,也不是激光雷达,更无法运行同步定位与建图(SLAM)算法。但如果您的自主移动机器人(AMR)或人形机器人需要高保真地测量力、应力、电流或温度,同时还能抵御电气干扰,那么NAFEB43388将成为一个出乎意料却极具战略价值的构建模块。
简而言之,这是一款工业DAQ前端,经过小型化处理,适用于嵌入式系统。它非常适合静默、连续的测量任务,助力机器人延长使用寿命、实现更智能的载荷搬运,并提升运行安全性。
在边缘实现更智能的感知。借助NAFEB43388,构建更可靠的机器人及工业系统。
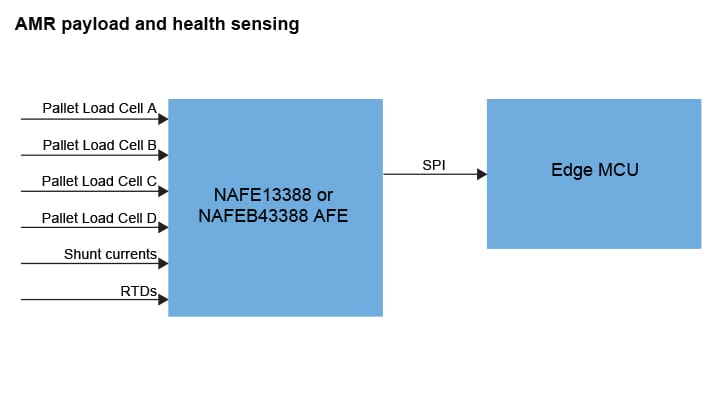
场景: 仓库中的一台AMR叉车驶入托盘下方,升起货叉,在移动之前,它会检查安装在货叉架周围的4个称重传感器。
NAFEB43388的作用: 称重传感器和应变计属于桥式传感器,需要低噪声、稳定的激励以及精确的增益。NAFEB43388提供精确的激励,应用可编程增益,并以24位分辨率进行数字化转换,从而能够分辨负载的细微变化(例如“17号箱的放置有点偏离中心”)。这8个通道可覆盖平台或立柱上的多点感测,同时提供总载荷与负载分布信息,以确保平衡与安全。
成效: 减少托盘倾覆事故。根据实际质量而非估算值制定更智能的路径规划和速度曲线。

场景: AMR已连续平稳运行数月。云仪表板显示一个趋势:在相同速度与负载条件下,电机相电流略有上升,同时轮边齿轮箱附近的温度也出现细微升高。
NAFEB43388的作用: 该器件能够复用多种精密读数,例如基于分流式电流、RTD、热电偶以及总线电压,从而将电气信号与热信号融合成一个单一的健康度评分。凭借在72kSPS下的17位ENOB,它能够以足够快的速度收集数据以满足诊断需求,同时保持用于无漂移趋势分析所需的DC精度。强大的输入保护确保在嘈杂的工业电磁干扰环境下依然可靠运行。
成效: 用计划性停机取代意外故障停机,使基于状态的维护成为现实。
工厂和仓库对线缆并不友好:错接、热插拔事故以及浪涌现象时有发生。NAFEB43388具备±36V的过压耐受能力,以及出色的ESD和浪涌鲁棒性,提供了普通AFE和MCU ADC引脚所不具备的生存余量。其结果是故障更少,机械、电气和固件团队之间因问题归属而产生的争议也显著减少。
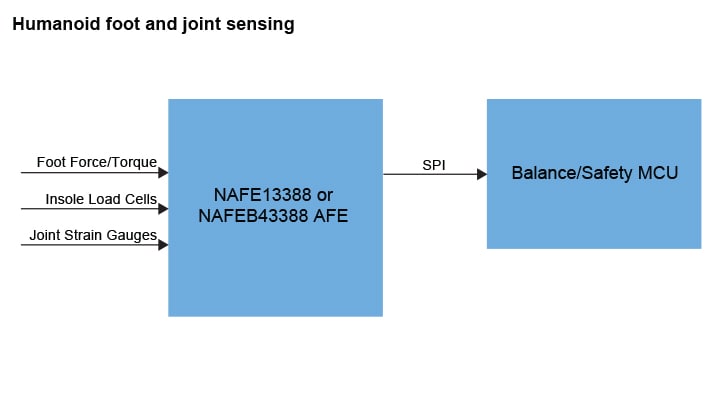
场景: 一台人形机器人站在不平整的格栅上。它的摄像头和IMU能够确定其位置,但要保持平衡,还必须了解重量是如何在每只脚之间分配的。
NAFEB43388的作用: 多轴足部力-扭矩传感器和分布式称重传感器,都能从同步、低噪声测量中获益。通过合理配置通道并共享激励,NAFEB43388能够检测出细微的负载变化,这对零力矩点(ZMP)控制和推力恢复至关重要。在该领域,精度通常比极高的千赫兹级采样率更重要,而Δ-Σ延迟对于100Hz至500Hz的控制环路而言处于可接受范围。

场景: 某个关节采用了带应变元件的串联弹性执行器(SEA)。您需要精确的扭矩以实现阻抗控制。
适用性:NAFEB43388的24位ADC、PGA及激励源,均为应变计而量身定制。但请勿将其置于内部电机电流环路中(5–20kHz):Δ-Σ转换延迟并不适合该任务。请将其与电机驱动器的快速SAR ADC或集成式分流感测配合使用,以实现电流控制;让NAFEB43388为外部阻抗与安全环路提供信息。
人形机器人功率密度高。在电机端盖中嵌入RTD,在逆变器上安装热电偶,在承重构件上贴附应变片,能够在分层或绝缘击穿之前发出早期预警。NAFEB43388的校准源与诊断功能,能够将这些微弱的信号转化为可操作的遥测数据,而无需在设计中使用大量模拟辅助板。
上述限制源于NAFEB43388的转换模型与通道数量——其优势在于精度,而非面向高吞吐量的任务。
对于控制环路中的力、扭矩及RTD感测,通常有效带宽为500Hz或更低。NAFEB43388支持从7.5SPS到288kSPS的宽范围数据速率设置,使您能够根据滤波器和控制环路的实际需求进行精确选择,同时兼顾延迟与ENOB。
桥式传感器需要稳定的激励。与临时驱动器相比,使用AFE内置的激励源可减少BOM、节省PCB面积、最小化增益与偏移漂移,并通过器件的内部基准简化现场校准。
8个通道以高数据速率运行时,数据量将显著增加。请合理规划MCU上的SPI时钟、DMA与缓冲;对多点力值读取采用时间对齐采样,以避免在平衡或载荷估算中出现混叠。
该器件的一个显著特点是具有稳健的前端保护(ESD、浪涌、错接)。在布线时,请注意高压模拟引脚的爬电距离与间隙,并将噪声较大的功率级予以物理隔离。这样您就能在实际工厂和仓库中保持数据手册级精度。
恩智浦提供NAFEB43388 EVK Arduino shield评估板及示例固件,可快速探索电压、电流、RTD及热电偶等模式,从而减少那些不熟悉模拟原理图的机器人团队在开发初期所面临的阻力。
某物流AMR曾出现轮子打滑,原因不明。工程师在升降台上安装了4个称重传感器,并将其接入NAFEB43388,从而能够实时估算有效载荷质量与重心位置。导航栈随后根据实际质量及重心偏移,对行驶速度与转弯速率进行限制。成果:在一个月内,打滑干预次数减少了40%,轮胎磨损也显著降低。该AFE的±25V输入范围与EMC鲁棒性,使其能够在电气环境恶劣的叉车作业区稳定运行,无需重新设计。
某双足研究平台在格栅地板上进行脚尖离地动作时稳定性不足。通过在前脚掌增加分布式称重传感器,并将其信号经NAFEB43388进行同步读取,控制器能够检测到微小的侧向负载变化,并在支撑阶段调整踝关节阻抗。200Hz下Δ-Σ延迟处于可接受范围,而内部校准基准则有助于在板载电力电子设备附近的热量波动中保持测量精度。
| 需求 | NAFEB43388适用程度 | 原因 |
|---|---|---|
| 有效载荷/称重传感器精度 | 极佳 | 桥式传感器+激励+ 24位精度 |
| 电池与热诊断 | 极佳 | 支持电压/RTD/热电偶混合测量 |
| 足部力与平衡(人形机器人) | 良好 | 高ENOB;同步多点感测 |
| 内部电机电流环路 | 不佳 | ΔΣ延迟;使用SAR/驱动器ADC |
| 视觉/SLAM传感器 | 不适用 | 属于数字、高吞吐量领域 |
| 超低成本机器人 | 超出需求 | MCU ADC可能已足够 |
NAFEB43388并非导航栈中的主角,而是一位静默的专家,让您的机器人保持准确、安全且耐用。在AMR中,它支持有效载荷精度与基于状态的维护。在人形机器人中,它赋能力与扭矩感知、平衡控制及健康监测——前提是不将其置于千赫兹速率的电机环路中。在高精度、稳健性与可配置性至关重要的场合使用它。将其与合适的驱动电子器件及控制架构搭配,您的机器人不仅能看得更清,还能更全面地感知和理解自身。
Alec现任恩智浦的市场与应用总监,负责管理面向工业应用的模拟ASSP。他在半导体行业拥有20年的经验,曾任应用工程师、市场工程师、业务经理、总监及执行总监等不同职务。他的技术专长涵盖射频、数据转换和传感器领域。Alec拥有得克萨斯大学奥斯汀分校的电气工程学士学位和硕士学位。