第3代电动汽车牵引逆变器控制参考设计EV-INVERTERGEN3快速入门

1. 开箱即用
恩智浦第3代电动汽车牵引逆变器SiC MOSFET支持套件帮助客户使用SiC MOSFET模块开发控制EV牵引电机的牵引逆变器模块。
本页将指导您设置并使用第3代电动汽车牵引逆变器控制参考设计(EV-INVERTERGEN3)。
1.1 EV-INVERTERGEN3概述
第3代电动汽车牵引逆变器控制参考设计

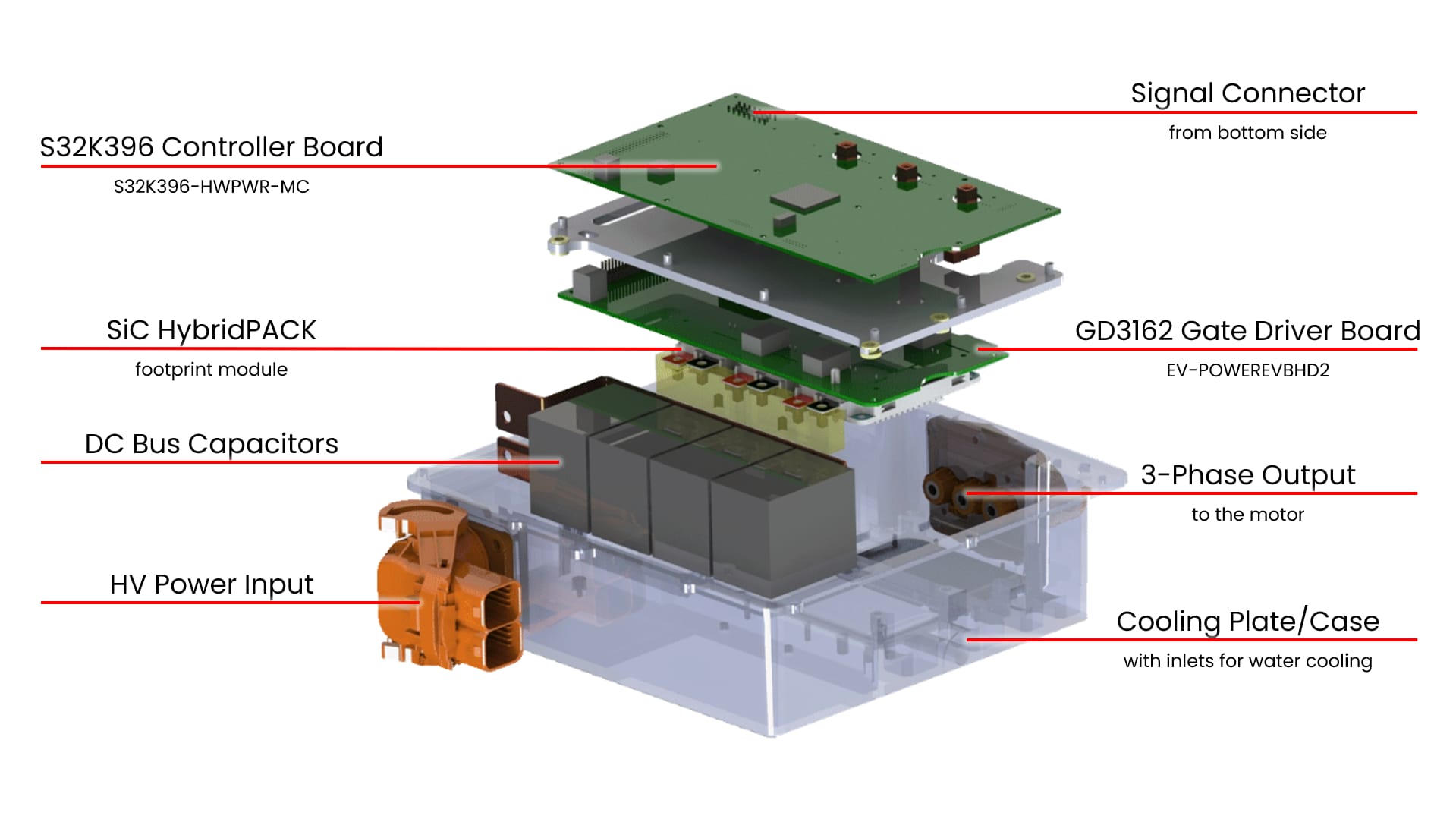
EV-INVERTERGEN3套件内含:
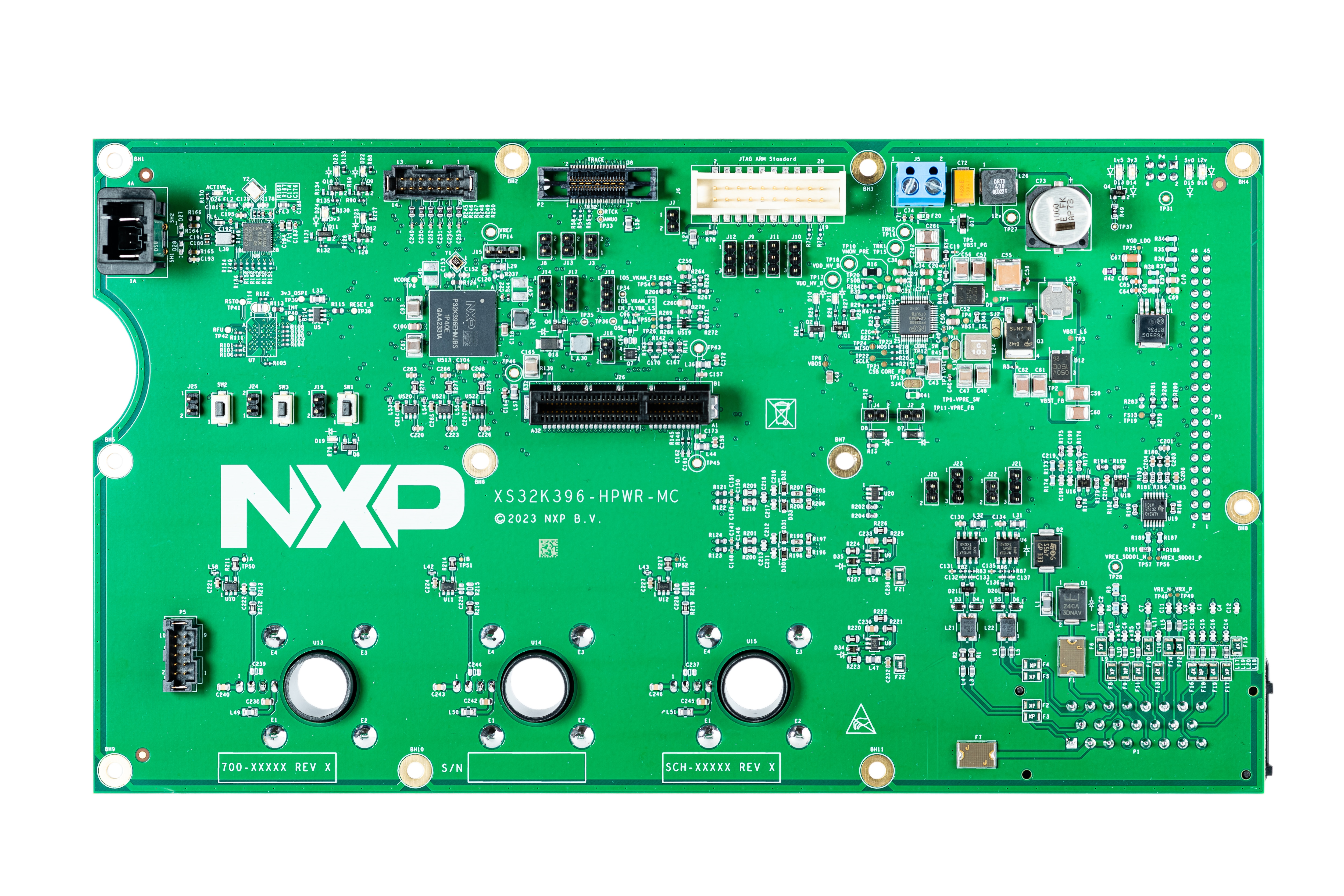
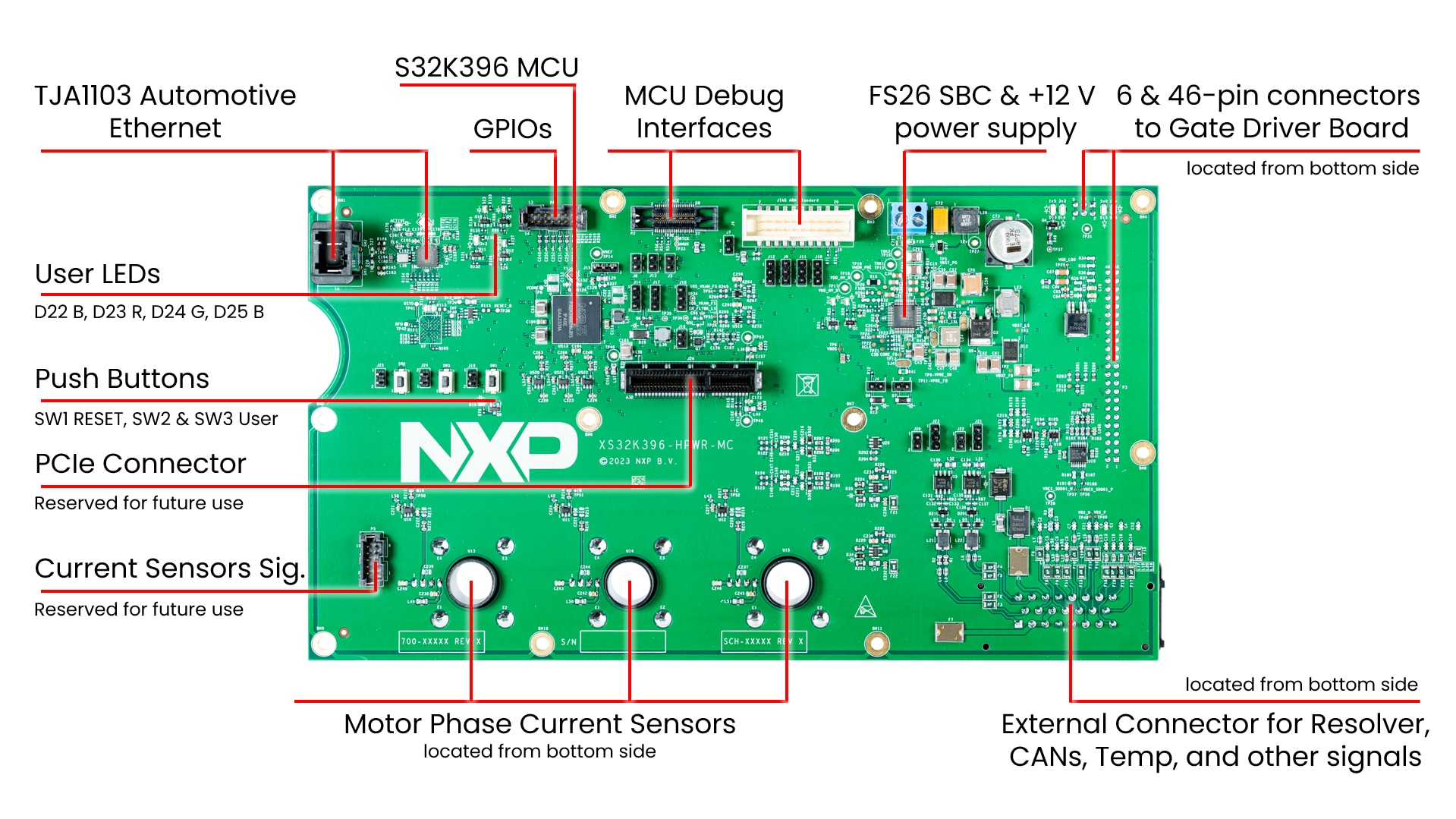
- MCU控制板(S32K396-HPWR-MC)
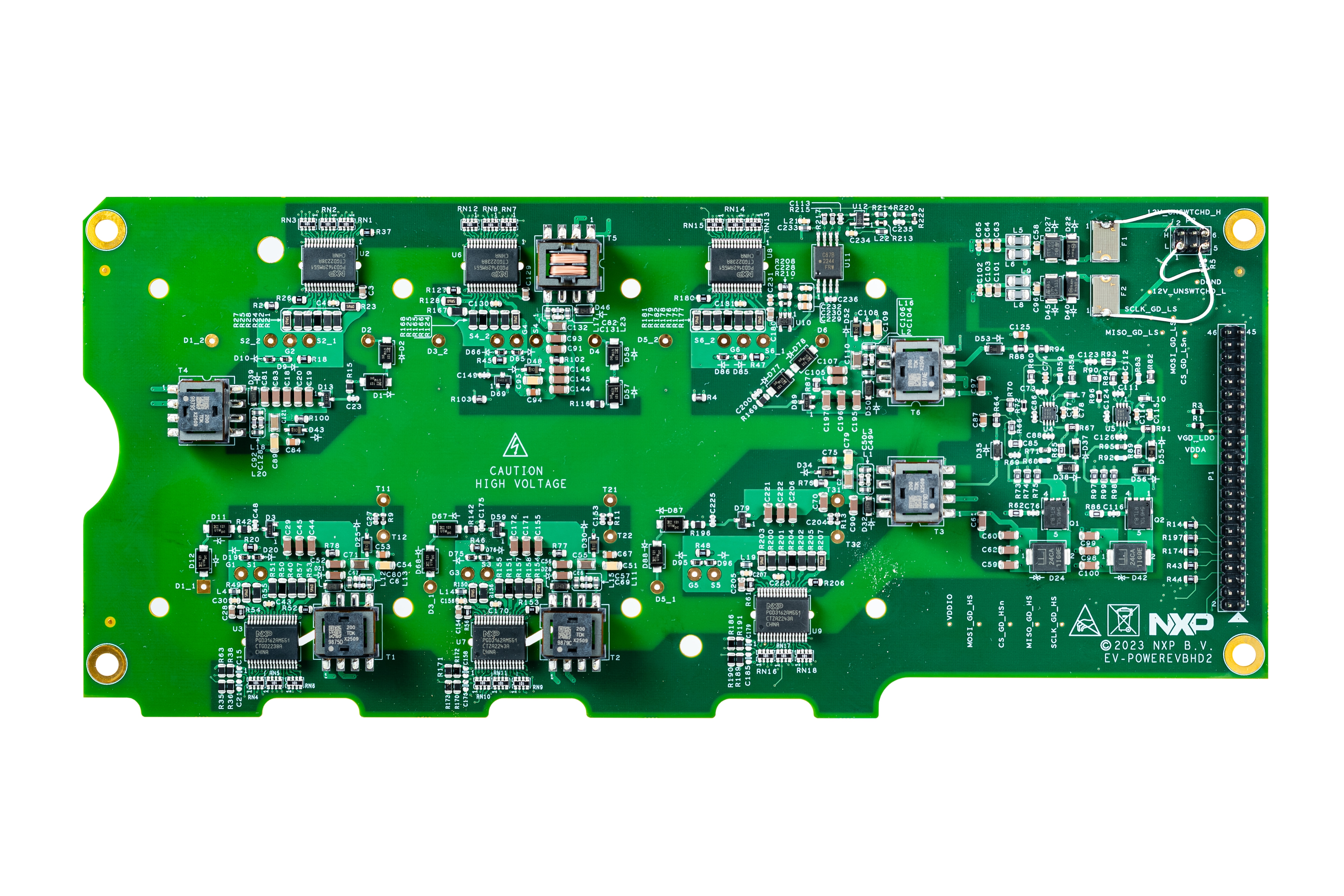
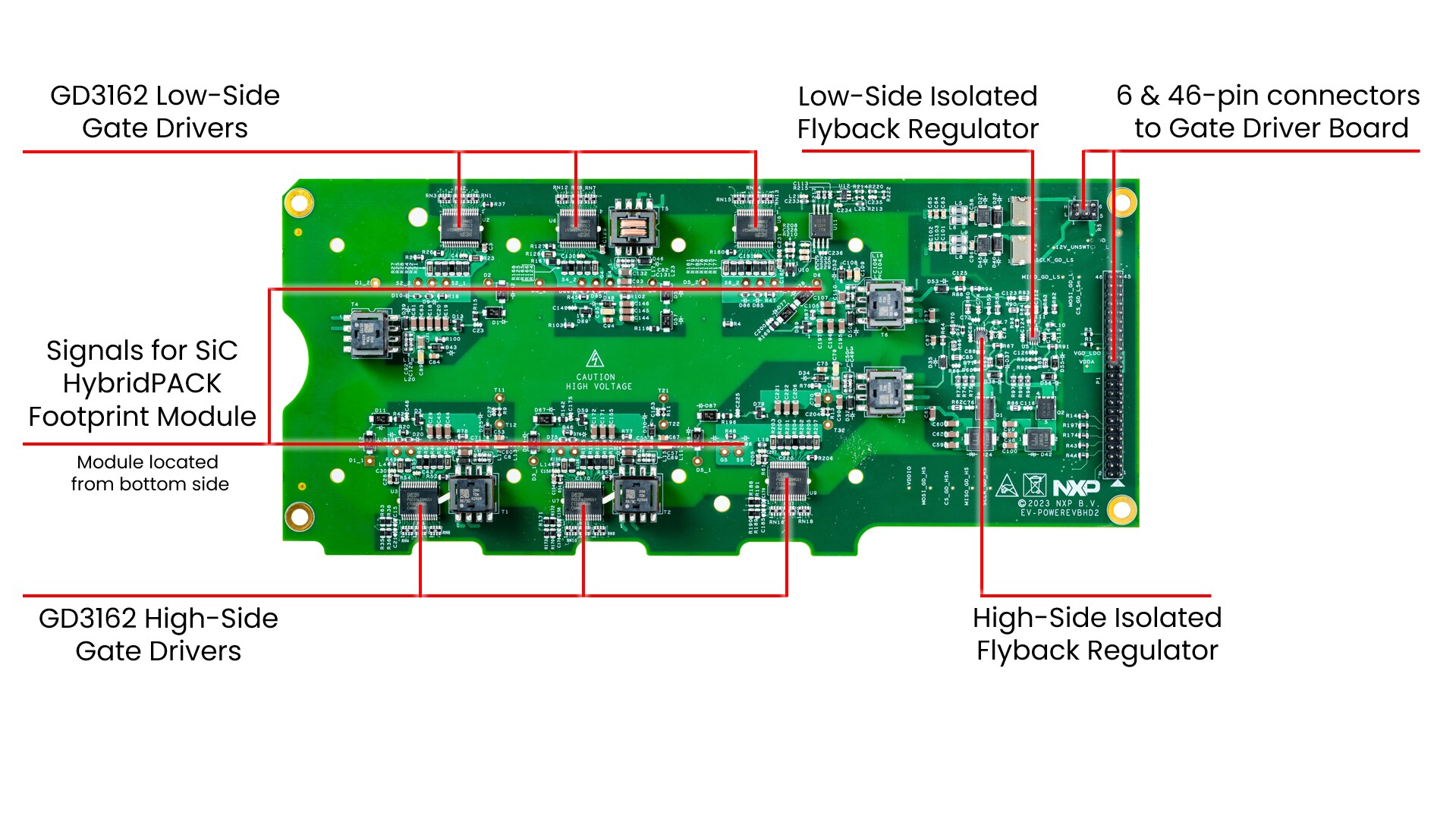
- 驱动器控制板(EV-POWEREVBHD2)
- 霍尔效应电流传感器的三相输出母线
- 6引脚和46引脚接头连接器,用于连接S32K396-HPWR-MC和EV-POWEREVBHD2板
要构建第3代电动汽车牵引逆变器控制参考设计,除了EV-INVERTERGEN3套件所包含的硬件外,还需要其他硬件。恩智浦合作伙伴Vepco可提供这些组件,或者您也可以构建自己的牵引逆变器设置:
- SiC HybridPACK封装模块
- 与SiC HybridPACK封装模块兼容的冷却板或水套
- DC link电容与SiC MOSFET模块之间的母线
- DC link电容
- 可选23位信号连接器AMPSEAL (PN 770680-1)
- 可选的高压屏蔽电缆(两线),用于将信号连接器连接至电机旋转变压器励磁
- 可选低压屏蔽电缆(21线),用于将信号连接器连接至电机旋转变压器感应信号、CAN、信号等
- 可选46引脚扁平带状电缆,用于将S32K396-HPWR-MC MCU控制板连接至EV-POWEREVBHD2驱动器控制板
- 可选的板支架,用于为组件提供机械支撑
开发牵引逆变器所需工具与组件:
- 12V低压DC电源
- 高压DC电源,如用于电机的800 VDC (或类似)电源
- USB-CAN接口,如PCAN-USB
- 兼容Arm的JTAG调试接口,如PEmicro Multilink硬件调试器
- 3相永磁同步电机(PMSM)
- 电源输入用高压电缆(两线)
- 用于电机的高压电缆(3线)
- 低压电缆,用于从12V DC电源为MCU控制板供电

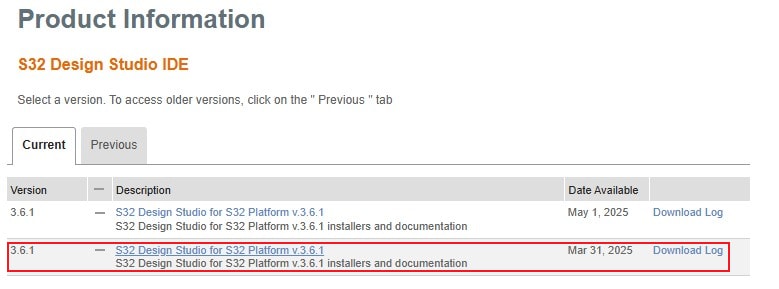
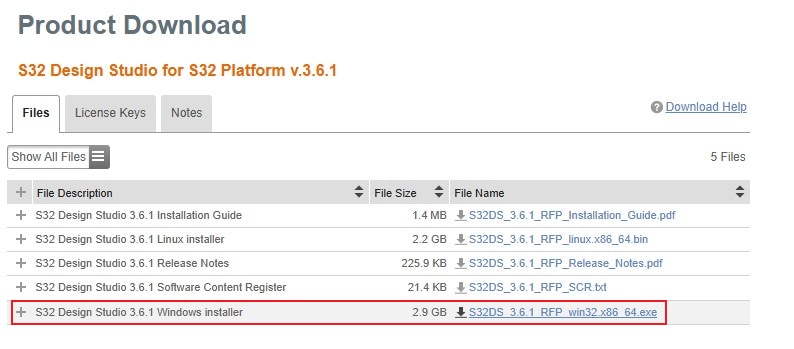
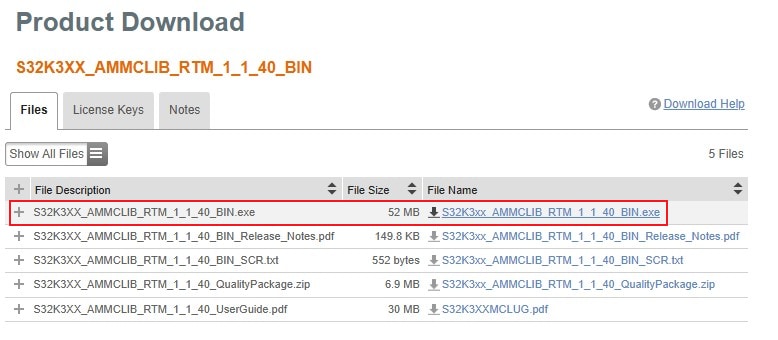
2. 获取软件
使用您的账号登录恩智浦官网 。
2.3 安装RTD驱动程序
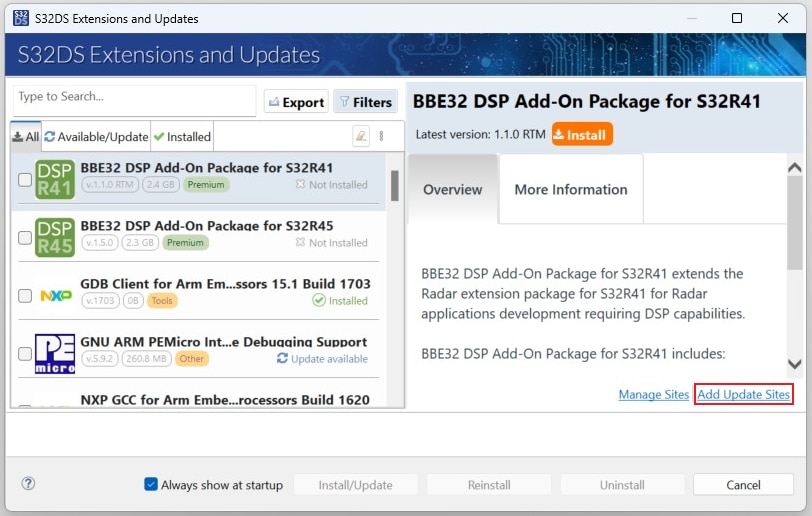
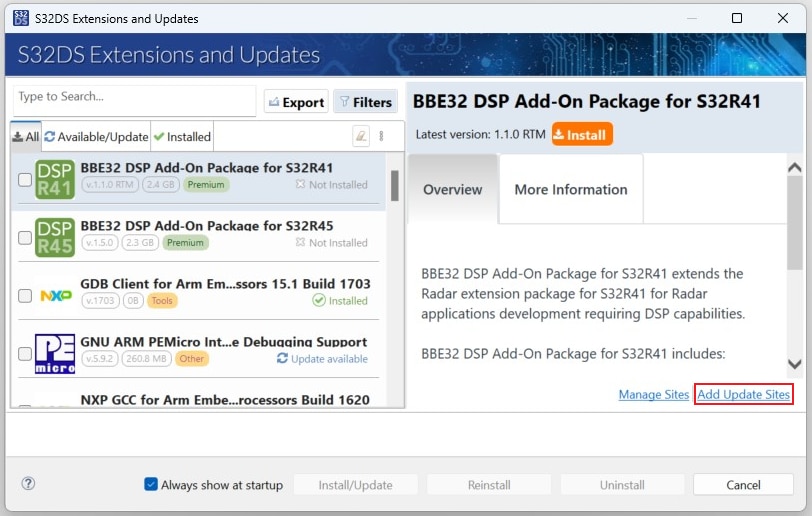
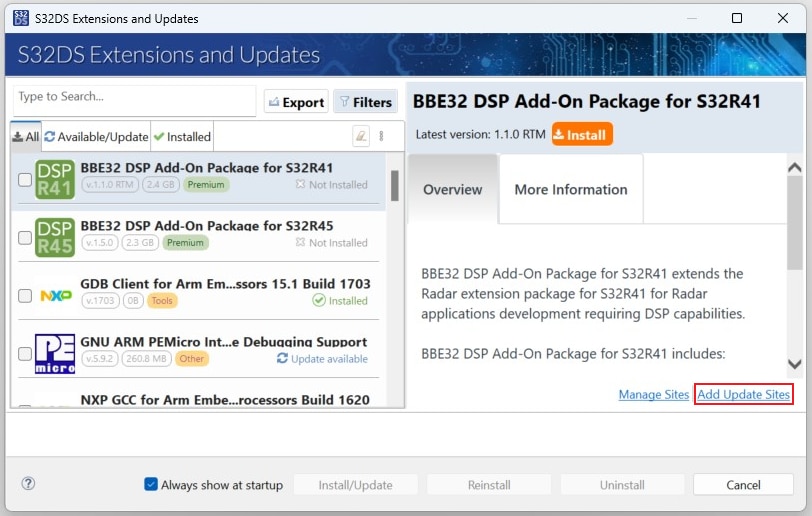
在S32DS中,从顶部菜单转到Help→S32DS Extensions and Updates(帮助→S32DS扩展和更新),打开“S32DS扩展和更新”对话框。
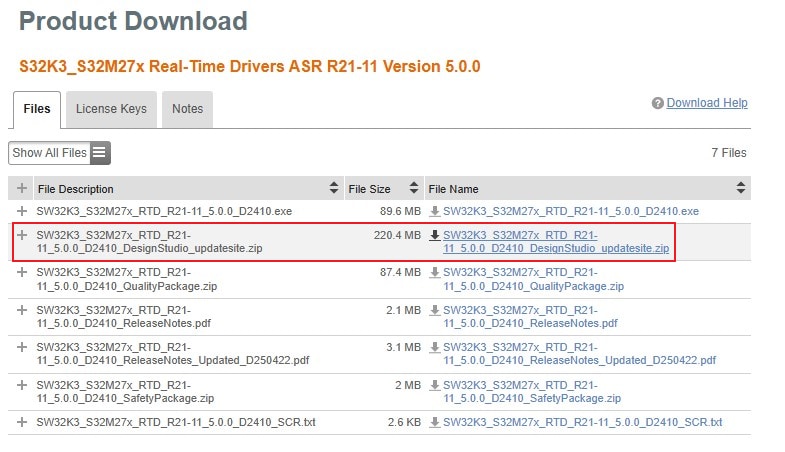
点击"Add Update Sites"(添加更新站点),并浏览下载的RTD *.zip文件。
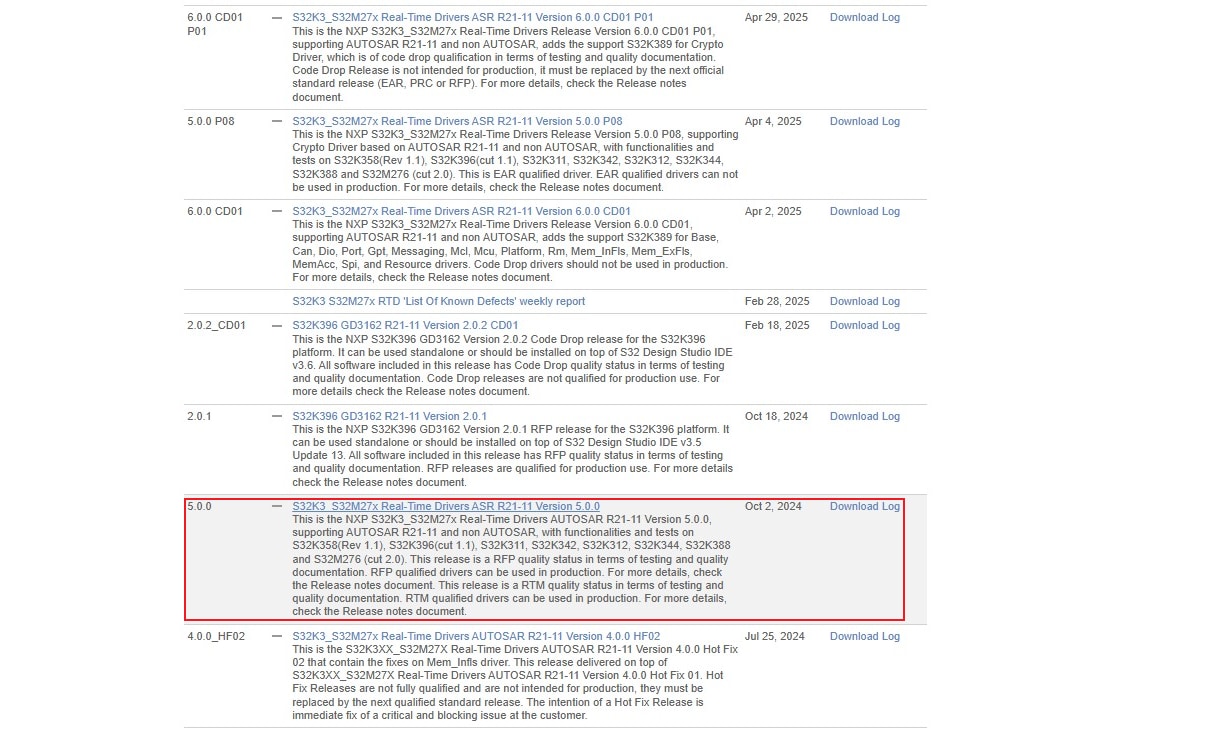
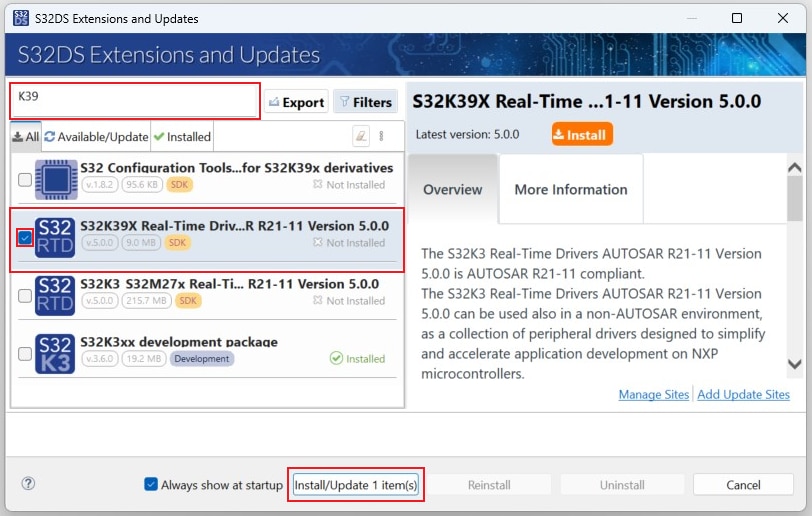
查找、选择并安装S32K39X实时驱动程序ASR R21-11 V5.0.0。
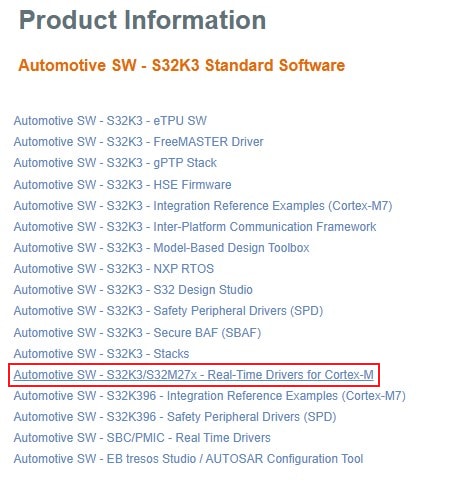
2.4 下载GD3162驱动程序
从Automotive SW - S32K3/S32M27x - Real-Time Drivers for Cortex-M软件包下载S32K396 GD3162 R21-11 V2.0.2 CD01驱动程序。
2.5 安装GD3162驱动程序
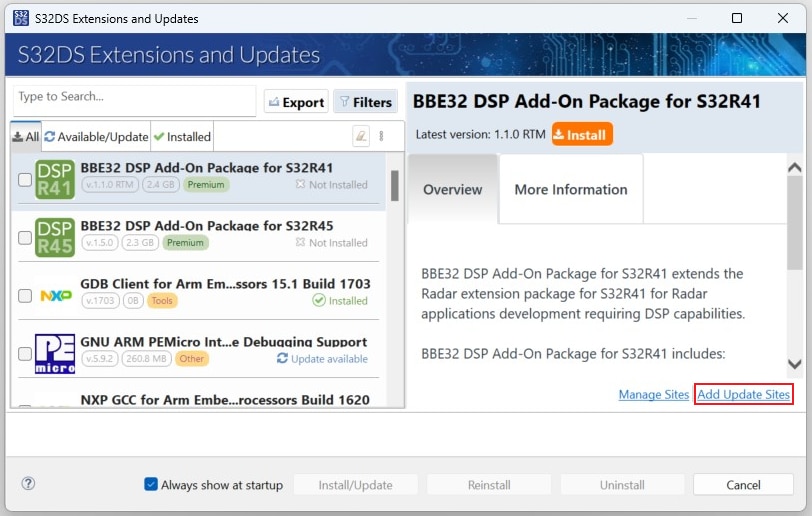
在S32DS中,从顶部菜单转到Help→S32DS Extensions and Updates(帮助→S32DS扩展和更新),打开“S32DS扩展和更新”对话框。
点击"Add Update Sites"(添加更新站点),并浏览下载的GD3162 update site文件。
 选择并安装GD3162驱动程序。
选择并安装GD3162驱动程序。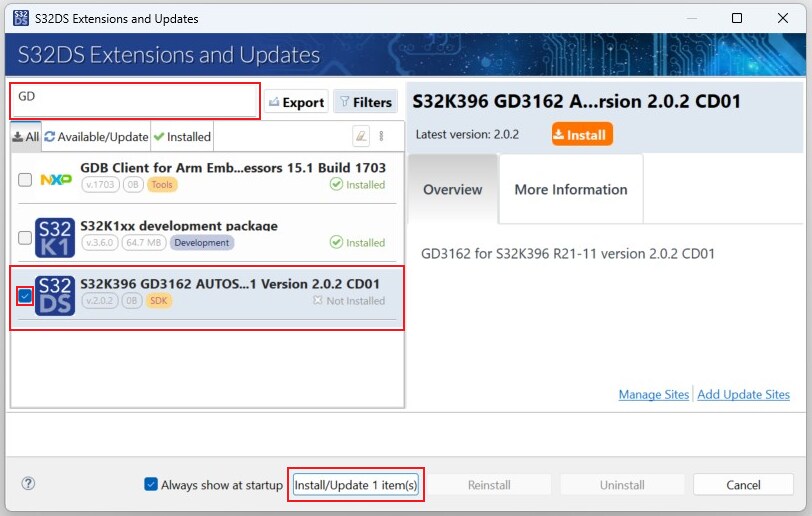
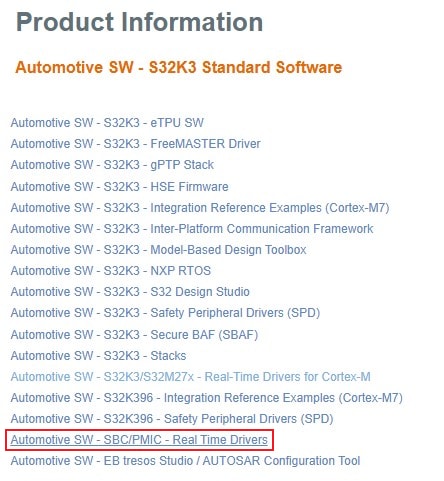
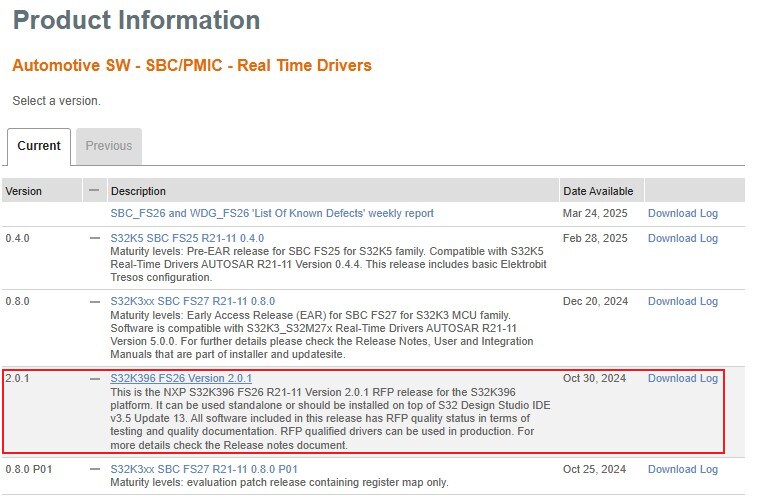
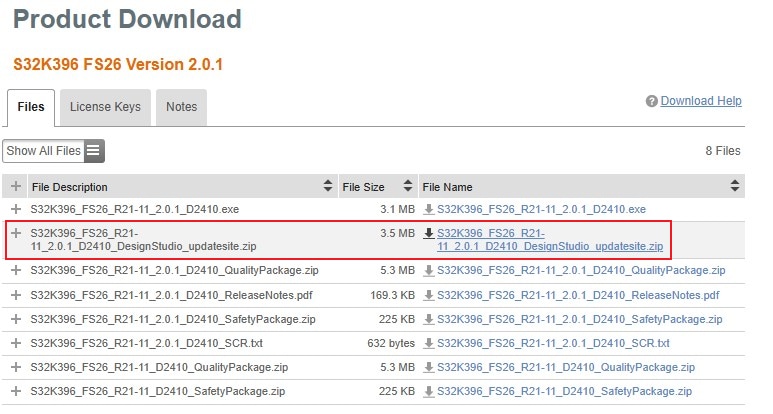
2.6 下载FS26驱动程序
2.7 安装FS26驱动程序
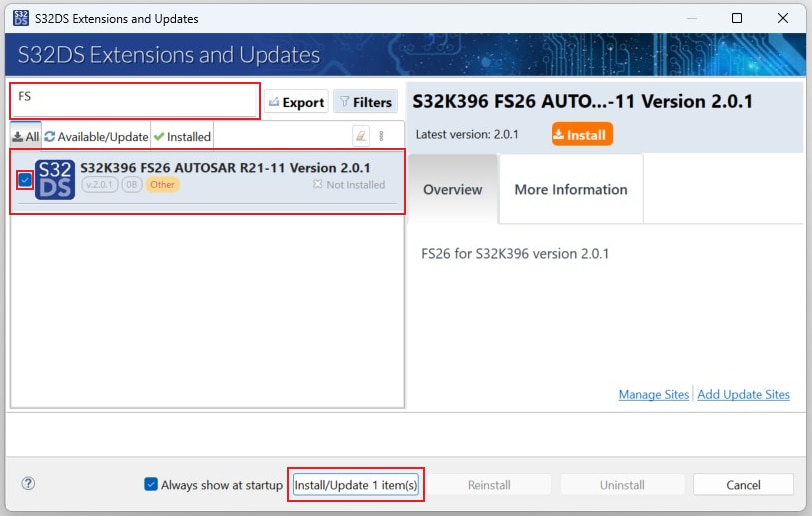
在S32DS中,从顶部菜单转到Help→S32DS Extensions and Updates(帮助→S32DS扩展和更新),打开“S32DS扩展和更新”对话框。
点击"Add Update Sites"(添加更新站点),并浏览下载的S32K396 FS26 Driver update site文件。
选择并安装FS26驱动程序。

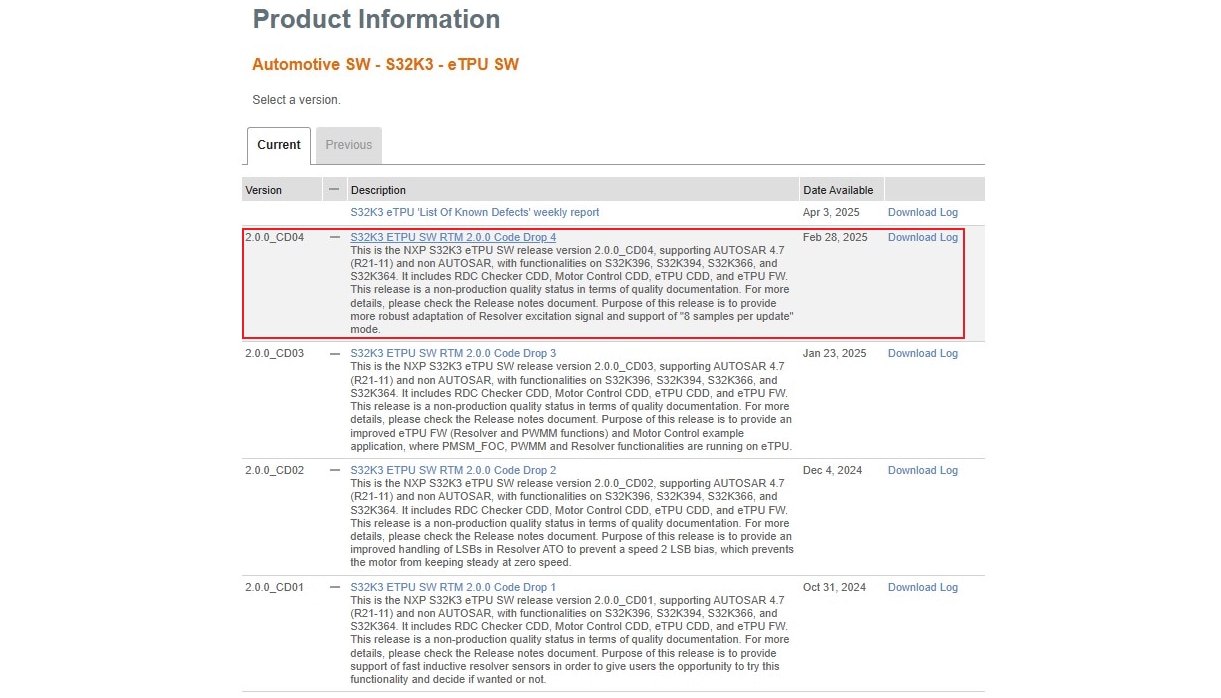
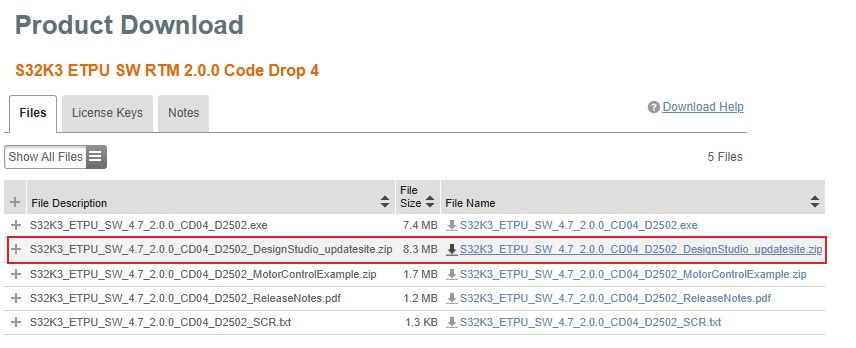
2.9 安装eTPU软件
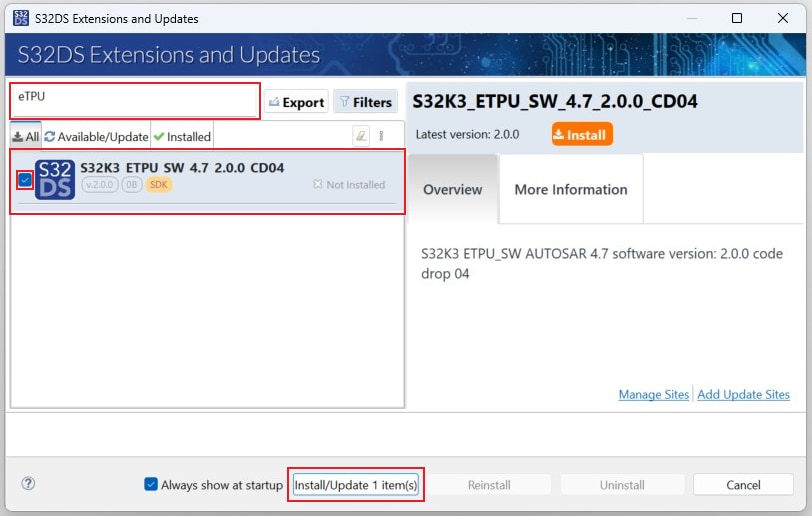
在S32DS中,从顶部菜单转到Help→S32DS Extensions and Updates(帮助→S32DS扩展和更新),打开“S32DS扩展和更新”对话框。
点击"Add Update Sites"(添加更新站点),并浏览下载的eTPU SW update site文件。
选择并安装eTPU软件。
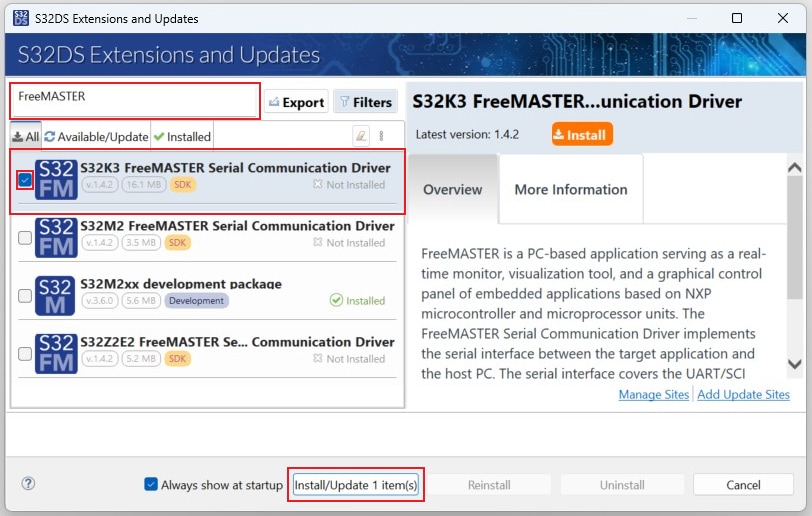
2.10 获取FreeMASTER通信驱动程序
在S32DS中,从顶部菜单转到Help→S32DS Extensions and Updates(帮助→S32DS扩展和更新),打开“S32DS扩展和更新”对话框。
选择并安装S32K3 FreeMASTER通信驱动程序。
2.14 获取CAN节点驱动程序(可选)
(可选)下载并安装CAN接口的驱动程序。例如,如使用PCAN接口,请在PEAK System 网页上选择接口,然后从“下载”部分下载Windows设备驱动程序和PCAN-View应用。安装下载的驱动程序和GUI工具。
3. 设置平台并将其连接到主机
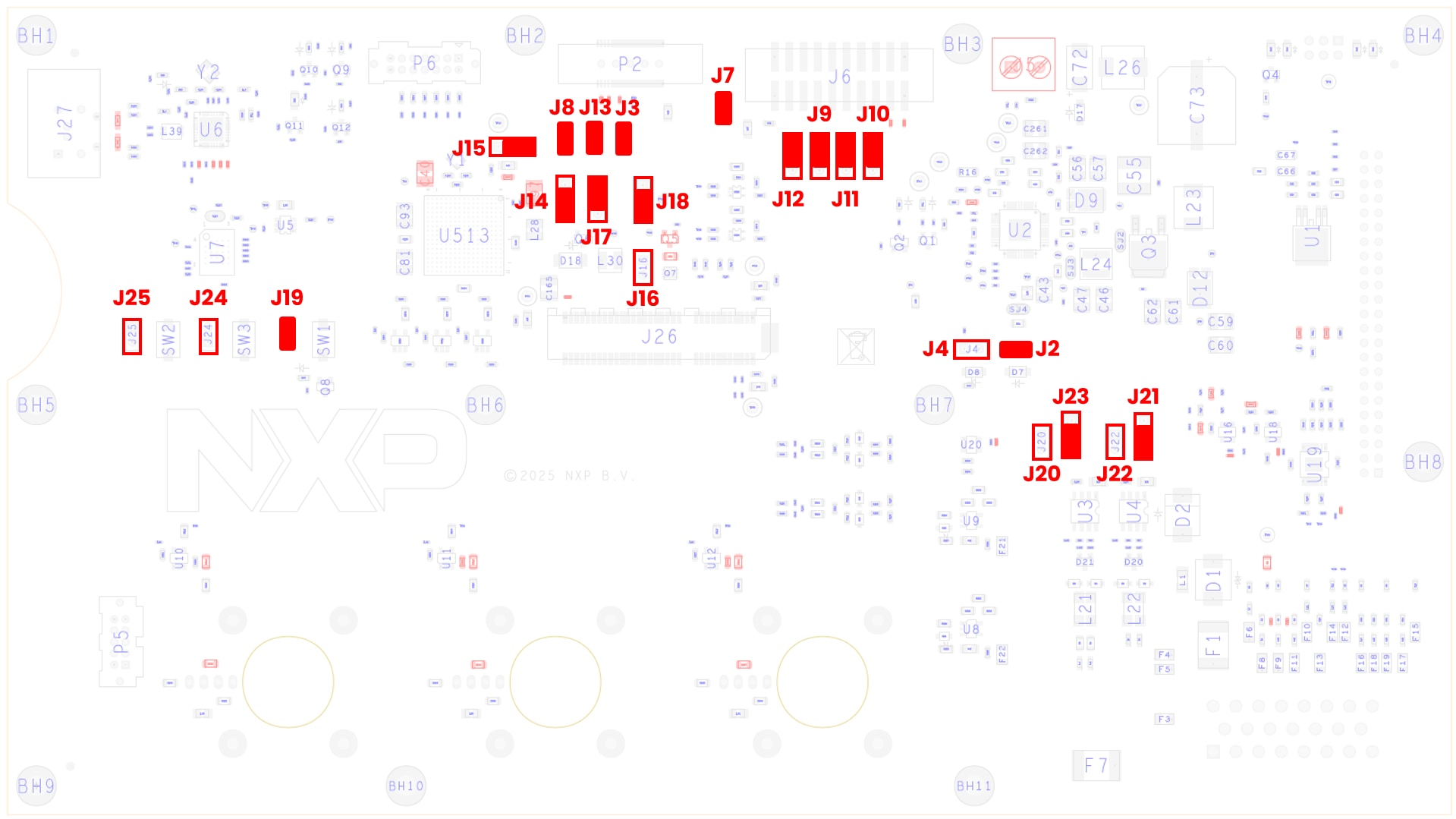
3.1 默认跳线位置
检查S32K396-HPWR-MC MCU控制板上的默认跳线位置。
| 跳线 | 状态 | 注释 |
|---|---|---|
| J2 | 闭合 | FS26_DEBUG引脚电压连接至FS26 VBOS信号。FS26将在禁用看门狗的调试模式下启动 |
| J3 | 闭合 | MCU RESET_B信号连接至FS26 WAKE2输入 |
| J4 | 断开 | FS26_DEBUG引脚与分压器断开连接 |
| J7 | 闭合 | VDD_HV_A连接至20引脚Arm标准JTAG连接器 |
| J8 | 闭合 | MCU RESET_B信号连接至38引脚Arm ETM Mictor连接器 |
| J9 | 1-2 | MCU JTAG TMS信号连接至20引脚Arm标准JTAG连接器 |
| J10 | 1-2 | MCU JTAG TDO信号连接至20引脚Arm标准JTAG连接器 |
| J11 | 1-2 | MCU JTAG TCK信号连接至20引脚Arm标准JTAG连接器 |
| J12 | 1-2 | MCU JTAG TDI信号连接至20引脚Arm标准JTAG连接器 |
| J13 | 闭合 | MCU RESET_B信号连接至20引脚Arm标准JTAG连接器 |
| J14 | 2-3 | 连接到VDD_HV_B电源域的1.5V PMOS晶体管稳压器的输入 |
| J15 | 2-3 | 从HDD_HV_A导出的VREFH_R2R参考(所有ADC的参考电压) |
| J16 | 断开 | 1.5V PMOS晶体管稳压器断开连接 |
| J17 | 1-2 | 1.5V PMOS晶体管由VDD_DCDC MCU信号驱动 |
| J18 | 2-3 | 1.1V NMOS稳压器由NMOS_CTRL信号驱动 |
| J19 | 闭合 | SW1 RESET按钮连接至RESET_B信号 |
| J20 | 断开 | CAN0收发器的待机信号与PTE5引脚断开连接 |
| J21 | 2-3 | CAN3收发器待机信号带下拉电阻 |
| J22 | 断开 | CAN3收发器的待机信号与PTF29引脚断开连接 |
| J23 | 2-3 | CAN0收发器待机信号带下拉电阻 |
| J24 | 断开 | SW3用户按钮旁路——PTG14引脚为HDD_HV_A电压 |
| J25 | 断开 | SW2用户按钮旁路——PTG4引脚为HDD_HV_A电压 |
3.2 组装逆变器
恩智浦的合作伙伴Vepco可提供用于构建逆变器的硬件组件设置,您也可以基于恩智浦EV-INVERTERGEN3组件自行构建牵引逆变器。下一节(3.3)将介绍在未使用Vepco平台的情况下构建逆变器的步骤。如果使用Vepco平台,请跳过第3.3节,直接从第3.4节的步骤8开始。
3.3 自定义硬件设置
下面的说明仅涉及电气连接。客户负责组装其物理结构(母线、安装硬件等),以支持和连接所选平台所需的组件。
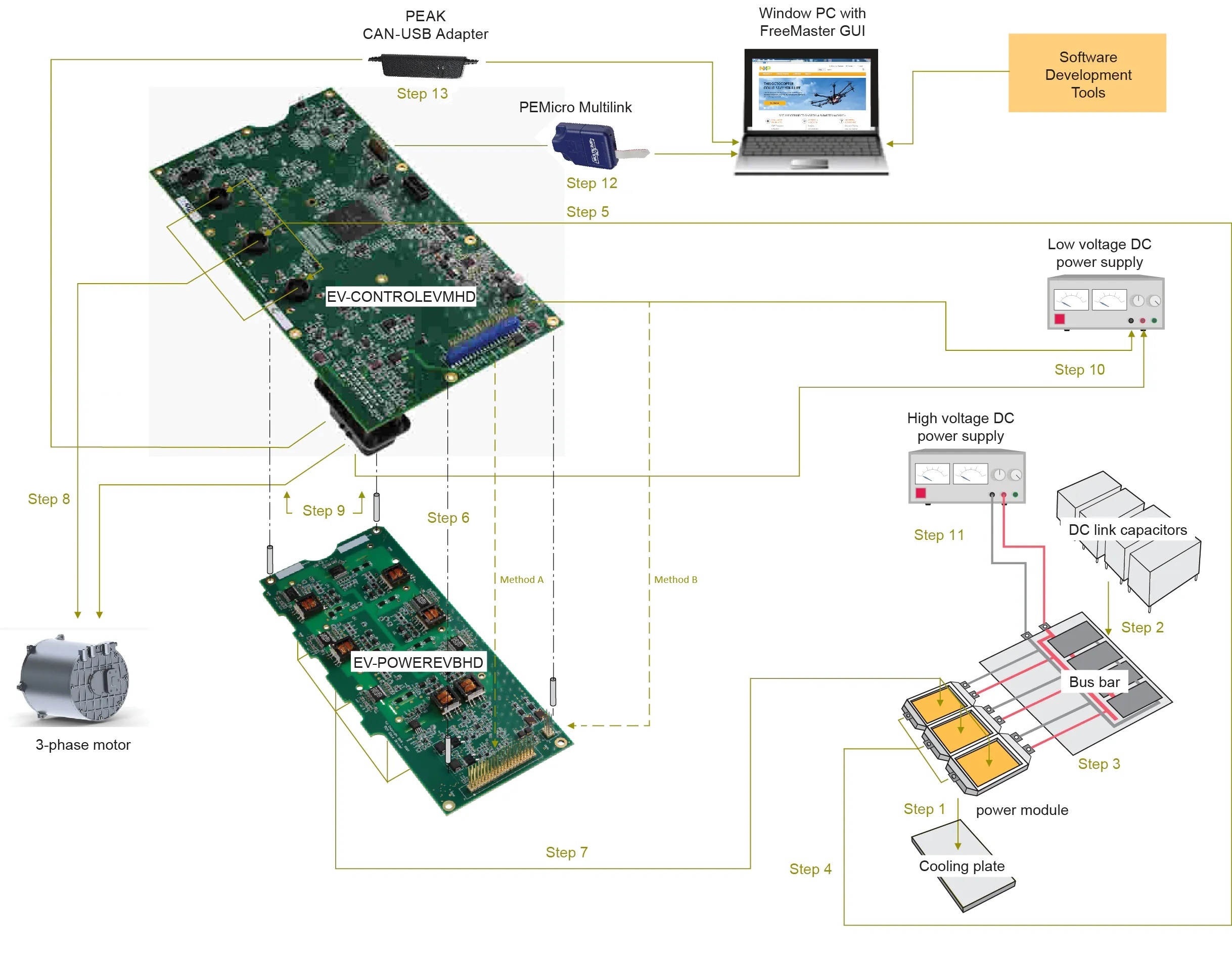
- 将Six-Pack (三相) SiC功率模块(Wolfspeed ECB2R1M12YM3LlSiC)连接至冷却板。
- 将DC link电容连接到母线。
- 将功率模块上的3个正极DC电源连接器连接到母线上的相应连接器。将功率模块上的3个负极DC电源连接器连接到DC link母线上的相应连接器。
- 将高压电缆连接到功率模块上的三相输出连接器。然后,将每根导线穿过S32K396-HPWR-MC板上的3个电机相电流传感器(U13、U14、U15)之一。
- 准备好上一步穿过电流传感器的三根高压电缆,并连接至电机。确保A、B、C连接正确匹配。
- 连接两个支持套件板。可以使用以下两种不同的方法进行连接:
- 方法A:直接连接46引脚连接器(P3和P4)和+12电源连接器(P4和P2),将S32K396-HPWR-MC板安装在EV-POWEREVBHD2板上。确保下层板上的引脚完全插入上层板上的连接器。使用支架在两块板之间提供结构支撑。请注意,通过这种方式连接板,EV-POWEREVBHD2板顶部的测试点和组件无法接入。
- 方法B:用电缆连接两块板。连接方式:使用46引脚带状电缆连接S32K396-HPWR-MC板上的P3连接器和EV-POWEREVBHD2板上的P1连接器。在此配置中,EV-POWEREVBHD2板必须独立于S32K396- HPWR-MC板供电。参见步骤8。
- 将EV-POWEREVBHD2板连接至功率模块。对齐功率模块最有效的方式是,将功率模块表面上的引脚与EV-POWEREVBHD2板底部的功率模块连接器对齐,然后将两个单元安装在一起。
3.4 逆变器硬件设置
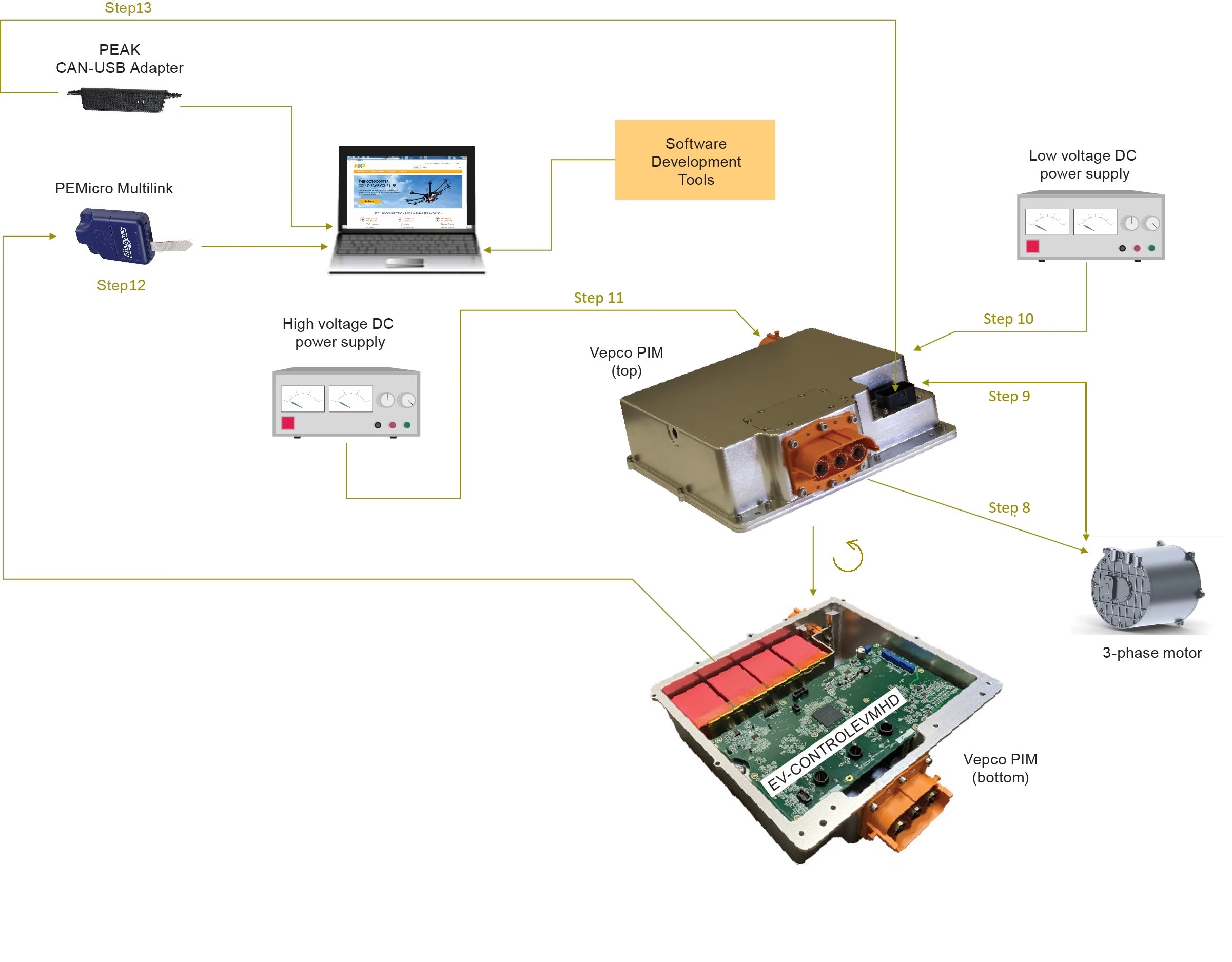
- 使用高压电缆将电机连接至功率逆变器
- 将电机旋转变压器连接至S32K396-HPWR-MC板上的23引脚P1连接器。连接方式如下:
- 使用两线大功率屏蔽电缆,将23引脚P1连接器上的引脚14和引脚21(旋转变压器励磁信号)连接到电机上的对应连接。将屏蔽接地线连接到23引脚连接器上的引脚6
- 使用低功耗电缆,将23引脚连接器上的引脚8、15、22和23(旋转变压器感测信号)连接到电机上的对应连接。将屏蔽接地线连接到23引脚连接器上的引脚9。23引脚连接器的信号表见下一节3.5
- 将低压DC电源(12V)连接至S32K396-HPWR-MC板上的P4连接器。如果使用步骤6中的方法B将S32K396-HPWR-MC板连接至EV-POWEREVBHD2板,则需要连接低压DC电源与EV-POWEREVBHD2板上的+12电源连接器(P2)。(两块板完成安装后,与方法A中的步骤6相同,EV-POWEREVBHD2直接由S32K396-HPWR-MC板上的+12电源连接器供电。)
- 使用两线高压电缆,连接高压/大电流DC电源上的正极连接器和母线上的正极DC link电容连接器。然后将高压/大电流DC电源上的负极连接器连接至母线上的负极DC link电容连接器。 警告:
DC高压电有致命危险。务必谨慎操作
- 将20引脚Arm JTAG调试器(如PEmicro Multilink)接头连接至S32K396-HPWR-MC上的连接器J6,引脚1标记对齐。使用USB线连接PEmicro Multilink和主机。PEmicro Multilink上的两个LED灯都应亮起,表示JTAG总线已通电并准备进行通信
- 使用USB-CAN接口适配器(PEAK System)将S32K396-HPWR-MC板底部的23引脚连接器连接至Windows PC上的USB端口。
3.5 23引脚连接器说明

| 引脚 | 符号 | 说明 | 值 |
|---|---|---|---|
| 1 | EXT_CANH_A | CANA高电平 | 晶体管-晶体管逻辑 (TTL) 0V至5V |
| 2 | EXT_DGND | 数字接地 | 0V,100mA |
| 3 | EXT_DGND | 数字接地 | 0V,100mA |
| 4 | EXT_12V_IGNIT | 点火 | 0V至16V |
| 5 | EXT_MTRTD1_RTRN | 电机RTD 1返回 | 电阻- |
| 6 | EXT_RSLVR_DRIVE_SHIELD | 旋转变压器励磁屏蔽 | 0V |
| 7 | EXT_RSLVR_SENSE_SHIELD | 旋转变压器传感屏蔽 | 0V |
| 8 | EXT_RSLVR_S1 | 旋转变压器传感S1 |
模拟100mA |
| 9 | EXT_CANL_A | CANA低电平 | TTL 0V至5V |
| 10 | EXT_FAULT_OUT | Fsb1 | TTL |
| 11 | EXT_DGND | - | - |
| 12 | EXT_MTRTD1_SIG | 电机RTD 1信号 | 电阻+ |
| 13 | EXT_MTRTD2_SIG | 电机RTD 2信号 | 电阻+ |
| 14 | EXT_RSLVR_R1 | 旋转变压器励磁R1 |
模拟100mA |
| 15 | EXT_RSLVR_S3 | 旋转变压器传感S3 |
模拟100mA |
| 16 | EXT_CANH_B | - | - |
| 17 | EXT_CANL_B | - | - |
| 18 | EXT_12V_UNSWTCHD | 无开关12V | 10V至16V,2A |
| 19 | EXT_GND_12V_RETURN | 12V GND | 0V,2A |
| 20 | EXT_MTRTD2_RTRN | 电机RTD 2返回 | 电阻- |
| 21 | EXT_RSLVR_R2 | 旋转变压器励磁R2 |
- |
| 22 | EXT_RSLVR_S2 | 旋转变压器传感S2 |
- |
| 23 | EXT_RSLVR_S4 | 旋转变压器传感S4 |
- |
4. 导入、构建电机控制应用并将其加载到MCU中
开始试用EV-INVERTERGEN3电机控制板。
4.1 选择“应用和项目导入”
从已安装目录中选择适当的PMSM电机控制应用。
NXP\MC_DevKits\EV-INVERTERGEN3 要在S32 Design Studio IDE for S32 Platform中导入已安装的应用软件项目:
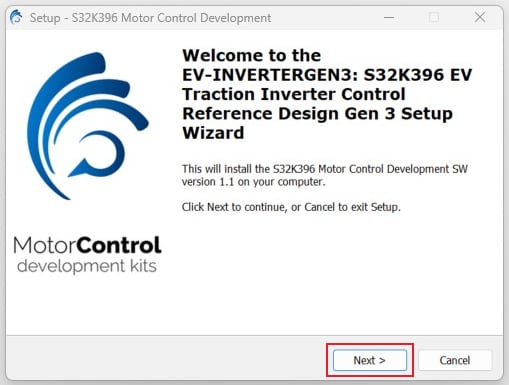
- 启动S32DS for S32 Platform
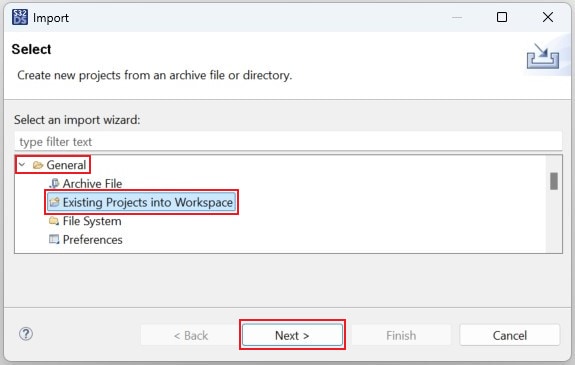
- 转到File → Import(文件→导入),然后选择General → Existing Projects into Workspace(常规→现有项目到工作区)
- 进入已安装应用目录:
NXP\MC_DevKits\EV-INVERTERGEN3,点击“选择文件夹”。接下来,选中Copy projects into workspace(将项目复制到工作区)选项框。然后,点击“完成”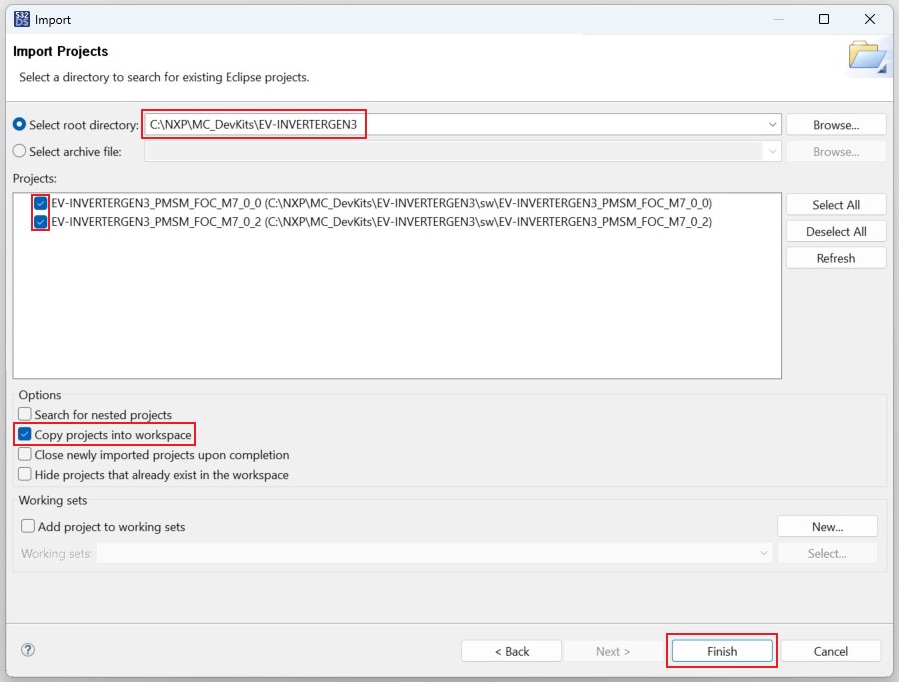
- 之后,将出现一个新窗口。首先用于
M7_0_0项目,然后用于M7_0_2项目。点击Yes To All(“全部是”)以覆盖两个项目目录中的“.settings”文件夹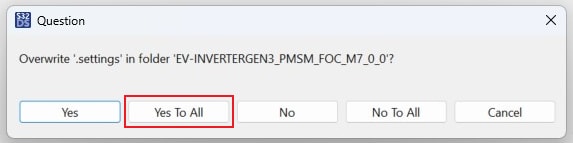
4.2 使用配置工具
- 展开第一个项目的结构,双击
*.mex文件,打开S32配置工具中的项目配置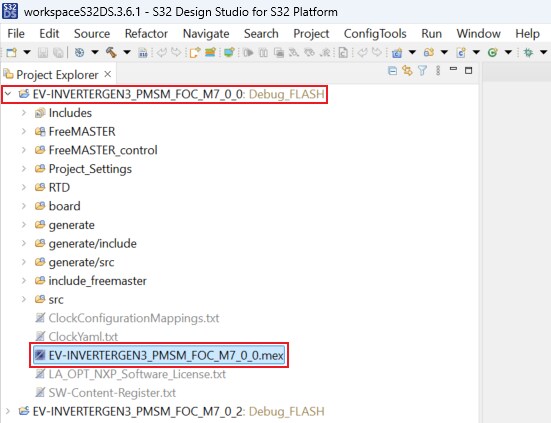
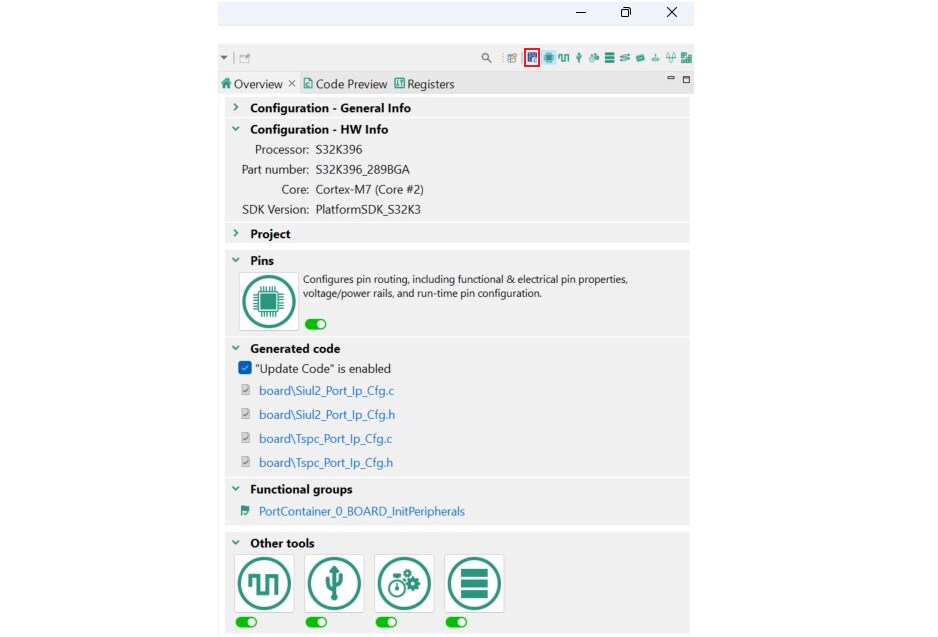
- 确定正在配置
M7_0_0项目,然后点击"Update Code"(“更新代码”)按钮生成配置文件。接下来,在S32配置工具中,点击项目名称旁的下拉按钮,为M7_0_2项目选择*.mex文件。相应地点击“更新代码”

4.3 上传软件并调试
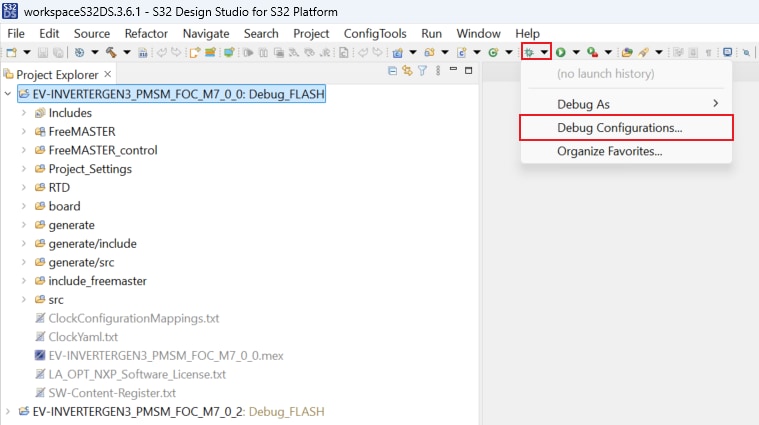
在S32DS中,点击右上角的按钮,切换回C/C++视图。
点击“调试为”菜单,然后选择“调试配置”。
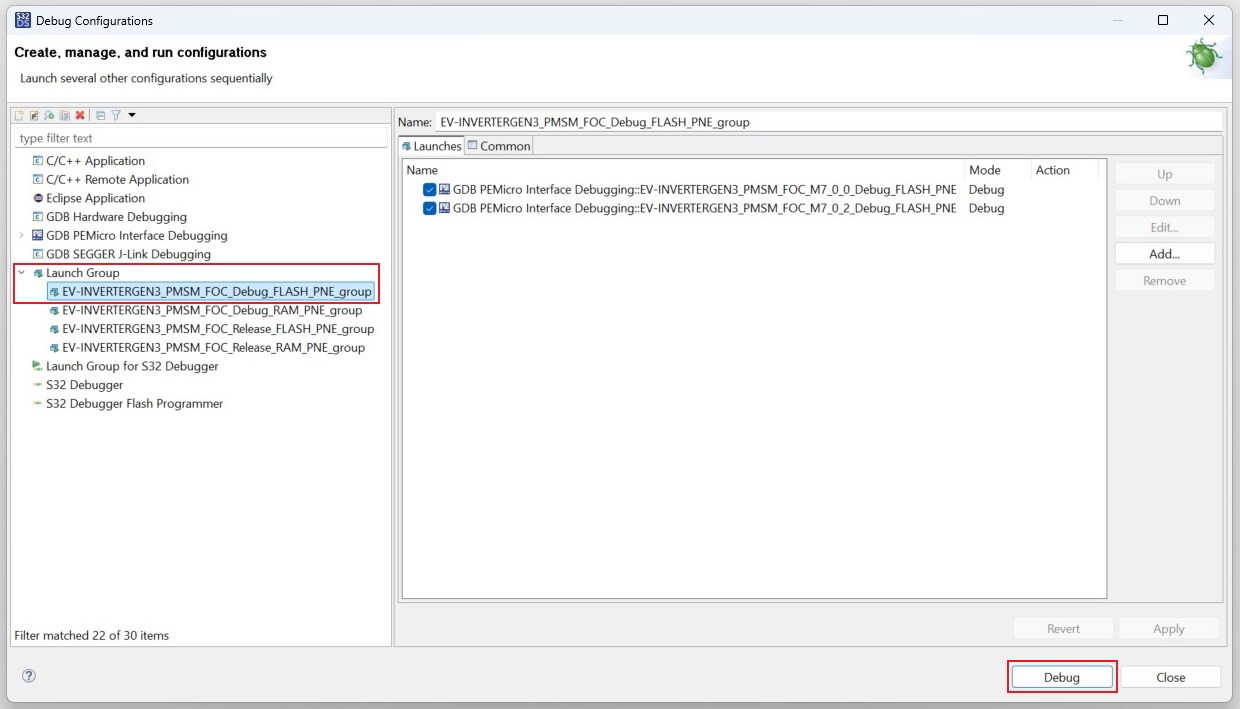
接下来,展开“启动组”并点击第一个启动配置。该配置将把M7_0_0和M7_0_2项目上传到MCU。点击“调试”,构建软件并将其上传到MCU中。
之后,将出现一个新窗口。选中“记住我的决定”选项框,然后点击“切换”。
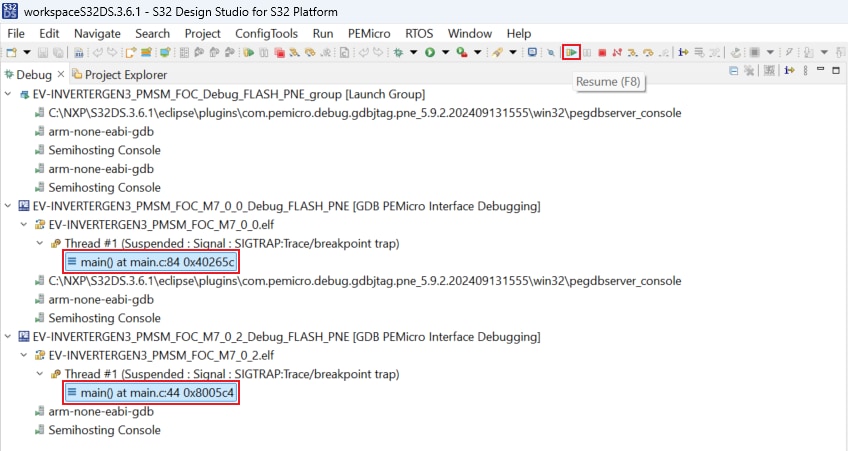
S32DS将切换到“调试”视图。首先,按住Ctrl键并点击两个项目main()文件以突出显示它们。接下来,通过点击“继续”(或按F8)让这两个项目都运行。
点击“断开连接”,避免S32DS IDE调试器和FreeMASTER工具之间的干扰。

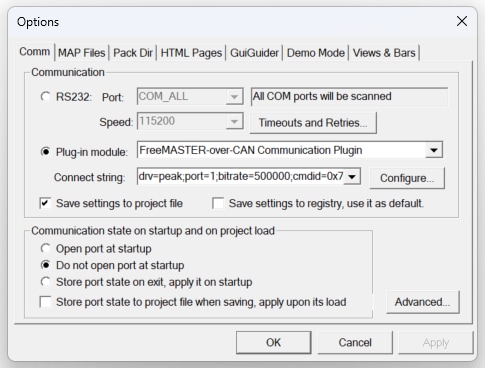
4.4 设置调试工具
启动FreeMASTER应用。
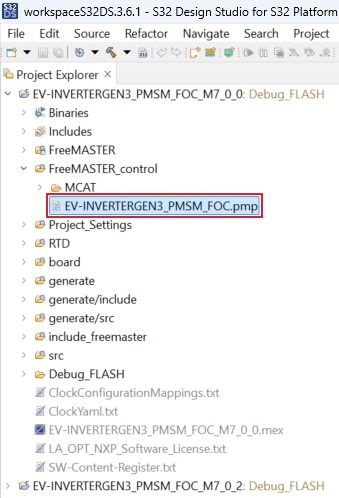
要打开*.pmp FreeMASTER project
在FreeMASTER工具栏中,点击Go(或按下Ctrl+G),启用通信。
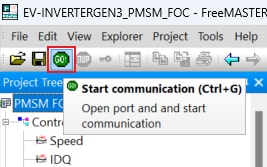
通信成功后,状态栏底部将显示如下信息:CAN;drv=peak;port=1;bitrate=500000;cmdid=0x7aa;rspid=0x7aa;tmo=1000。
5. 控制应用
5.1 让电机运转
电机参数(可选步骤)
如未使用Vepco电机,可能需要根据使用的PMSM电机编辑电机参数。在电机控制应用调优(MCAT)工具中,切换到“参数”选项卡并在左侧编辑值。
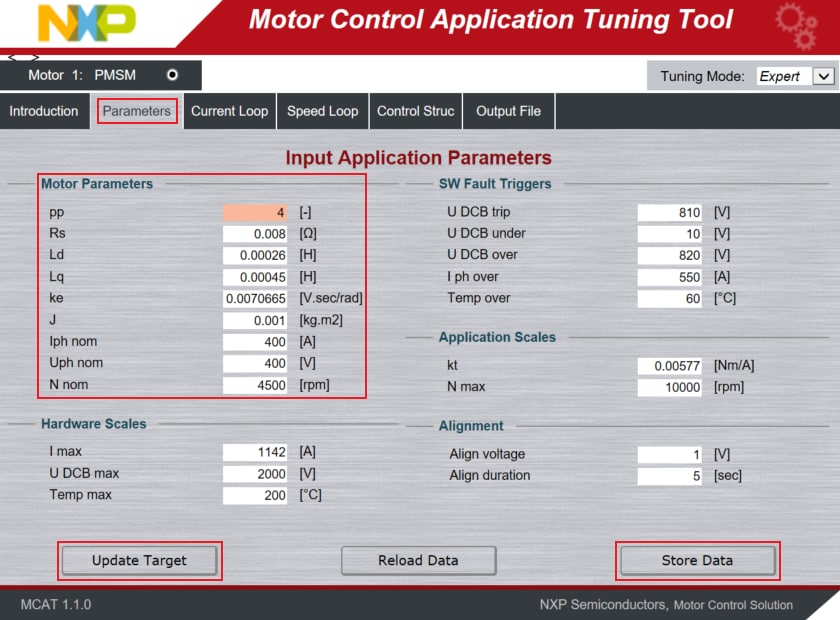
编辑完电机参数后,点击“存储数据”,切换到“输出文件”选项卡,点击“生成配置文件”。
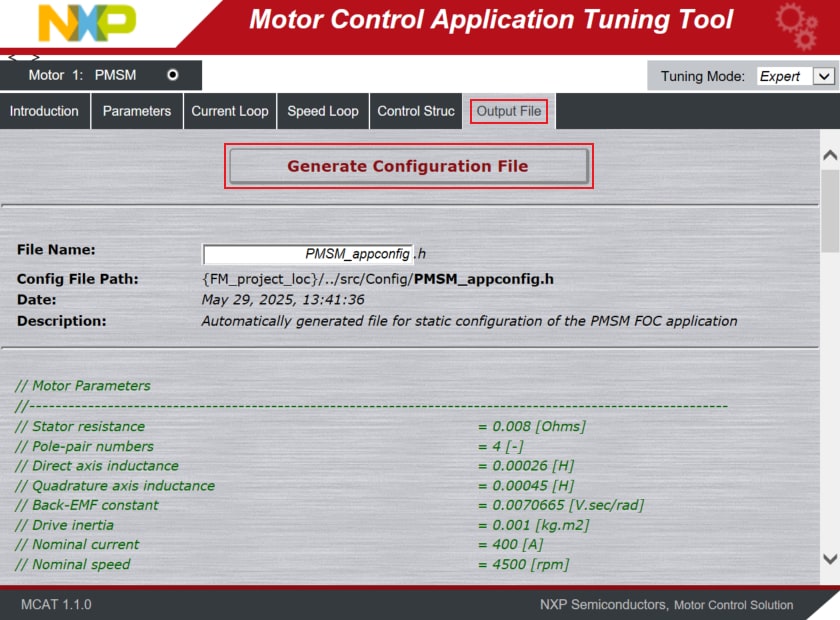
由于电机参数无法在运行时更新,因此请重复步骤4.3,构建项目并将代码上传至MCU。
可在开环中运行电机
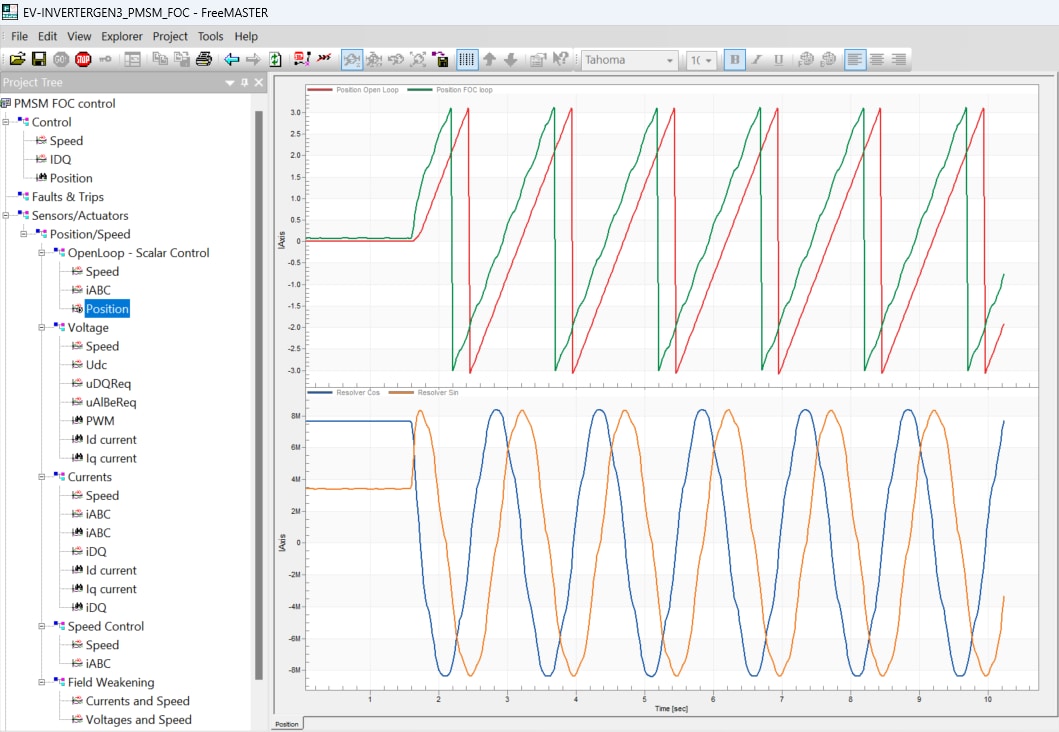
- 在“项目树”中,通过
Sensors/Actuators→Position/Speed→OpenLoop - Scalar Control选择“位置”视图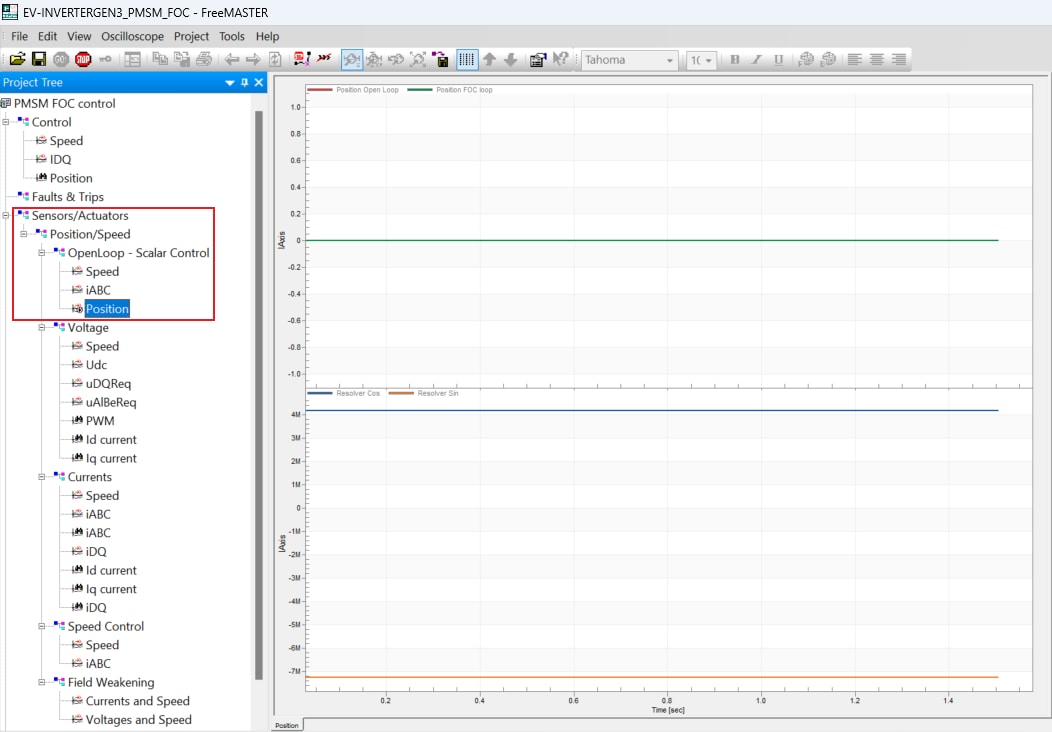
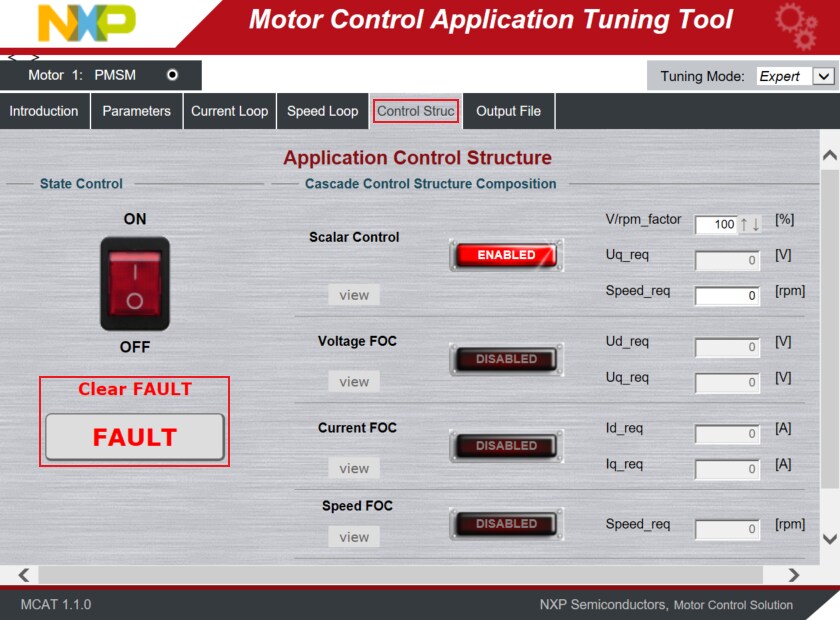
- 切换到MCAT工具中的“控制结构”选项卡,然后选择“标量控制”
- 可选择点击MCAT中的FAULT按钮,清除任何待处理故障
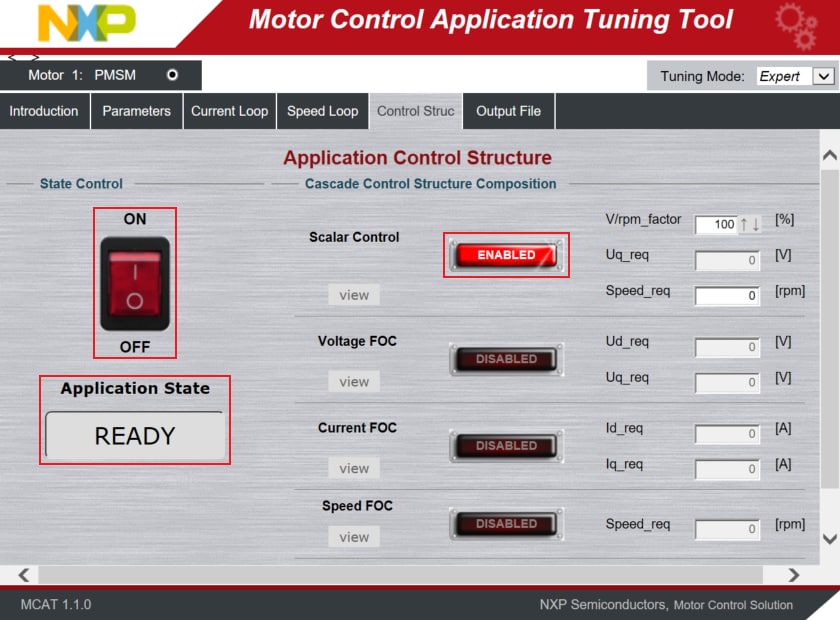
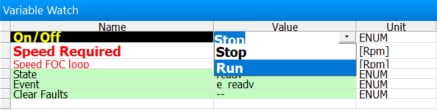
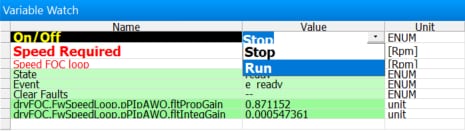
- 当状态READY出现时,确保“标量控制”已启用,并通过选择变量ON/Off to Run在MCAT或“变量监视”窗口中将应用切换到ON
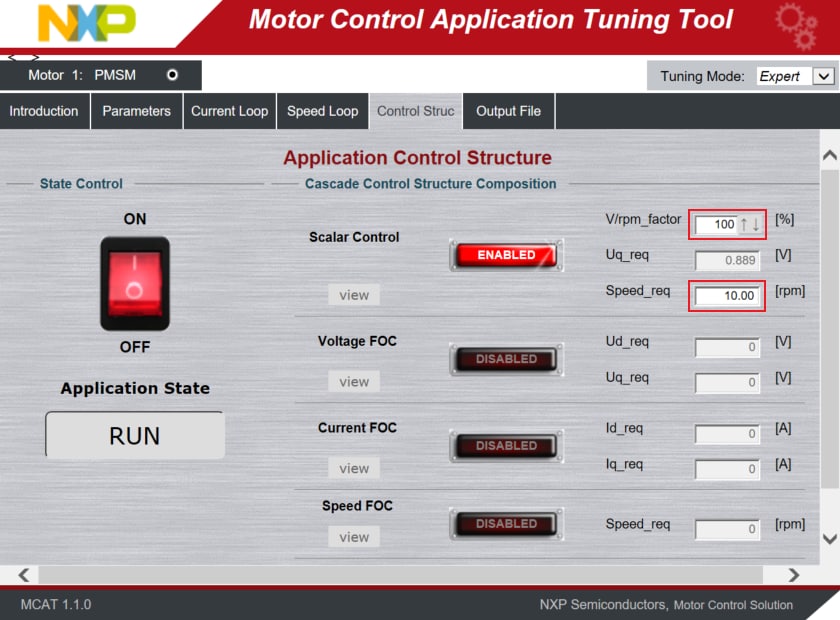
- 在MCAT中设置Speed_Req值,让电机开始运行,由于控制环中缺少反馈,最大转速建议不超过20rpm。评估时建议设为10rpm。可选择增加V/rpm_factor,让电机运行
- EV-INVERTERGEN3中的标量控制策略(开环)可用于调试来自旋转变压器的反馈位置信号。查看并比较旋转变压器电机位置的开环和反馈。若位置信号出现相位反转,请交换任意两根电机相线,以同步电机与旋转变压器的旋转方向。具有同步旋转方向的波形:
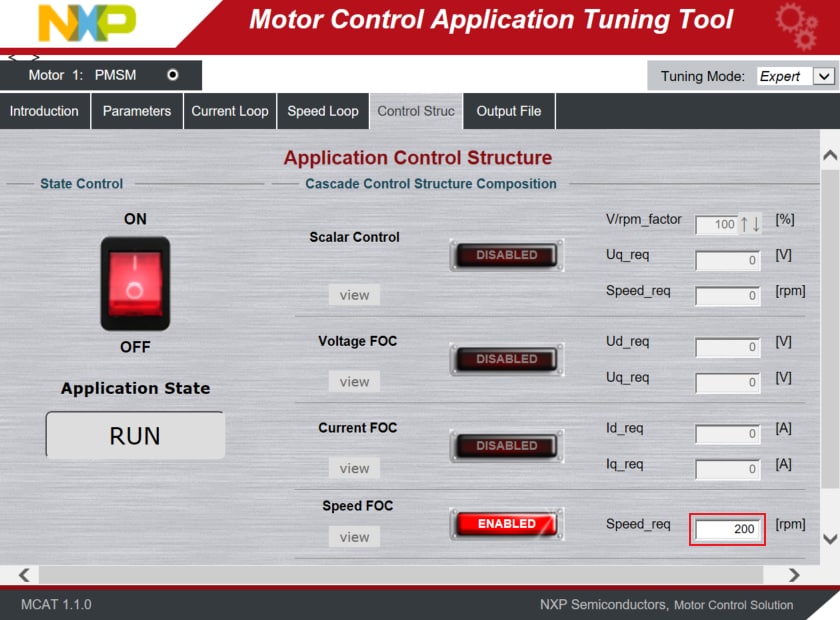
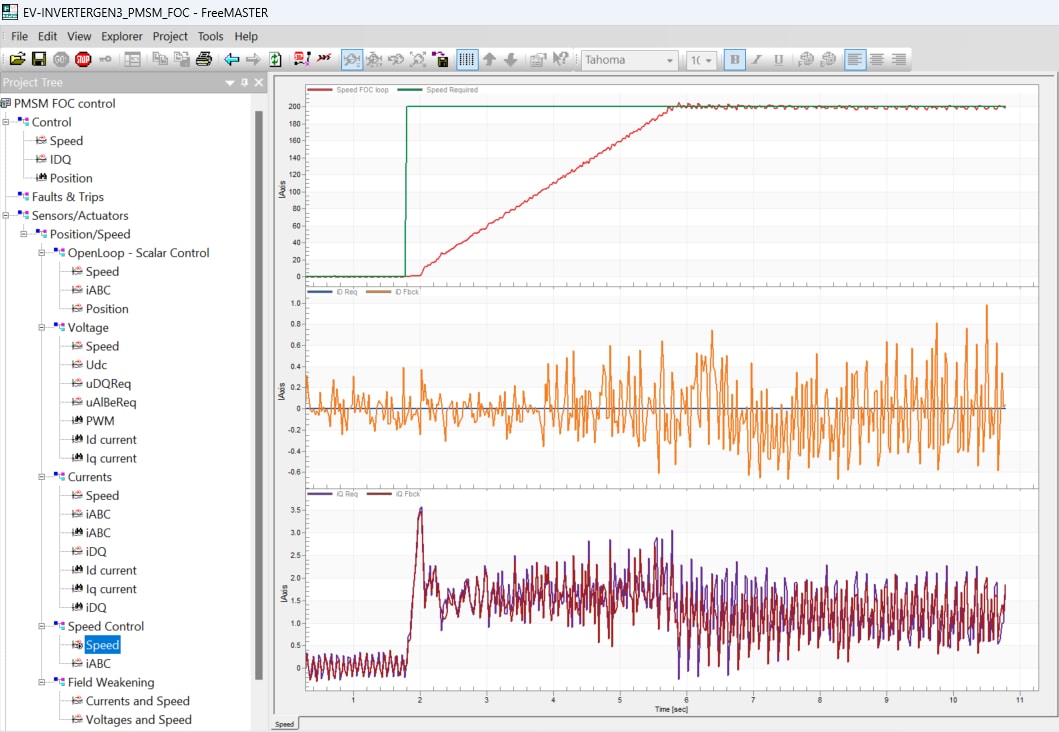
在闭环(FOC)中让电机运行
- 在“项目树”中,通过
Sensors/Actuators→Position/Speed→Speed Control选择“速度”视图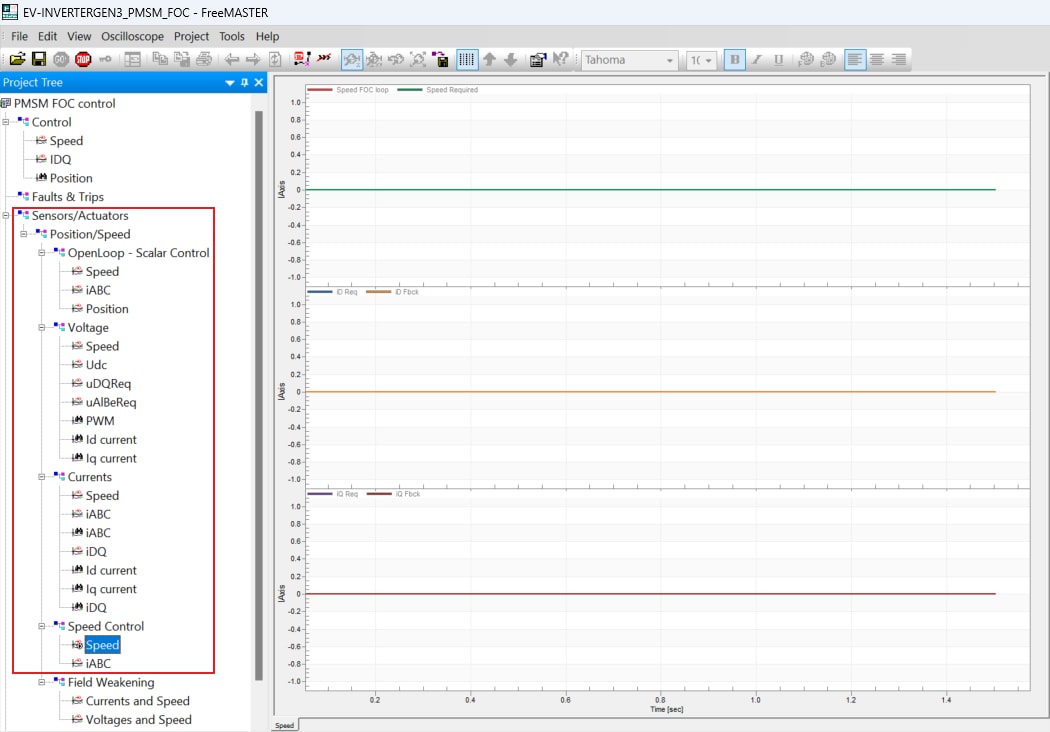
- 切换到“电机控制应用调优”(MCAT)工具中的“控制结构”选项卡
- 可选择点击MCAT中的FAULT按钮(应用状态),清除任何待处理故障
- 当状态READY出现时,确保“速度FOC”已启用,并通过选择变量ON/Off to Run在MCAT或“变量监视”窗口中将应用切换到ON
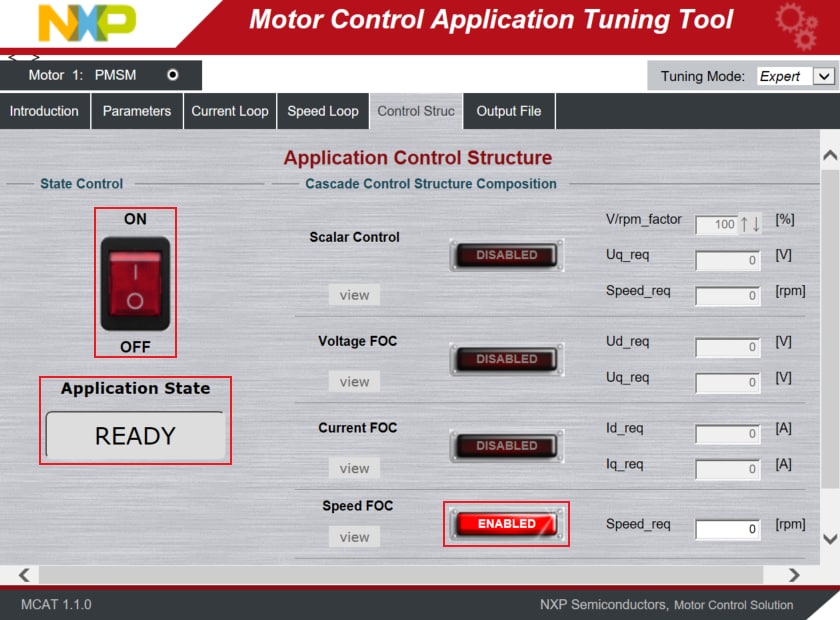
- 在MCAT中设置Speed_Req值,使电机开始旋转
如需深入了解使用MCAT进行电机控制应用调优,请参阅AN4642:面向三相PMSM的电机控制应用调优(MCAT)工具。