3.1 Explore the SDK Package
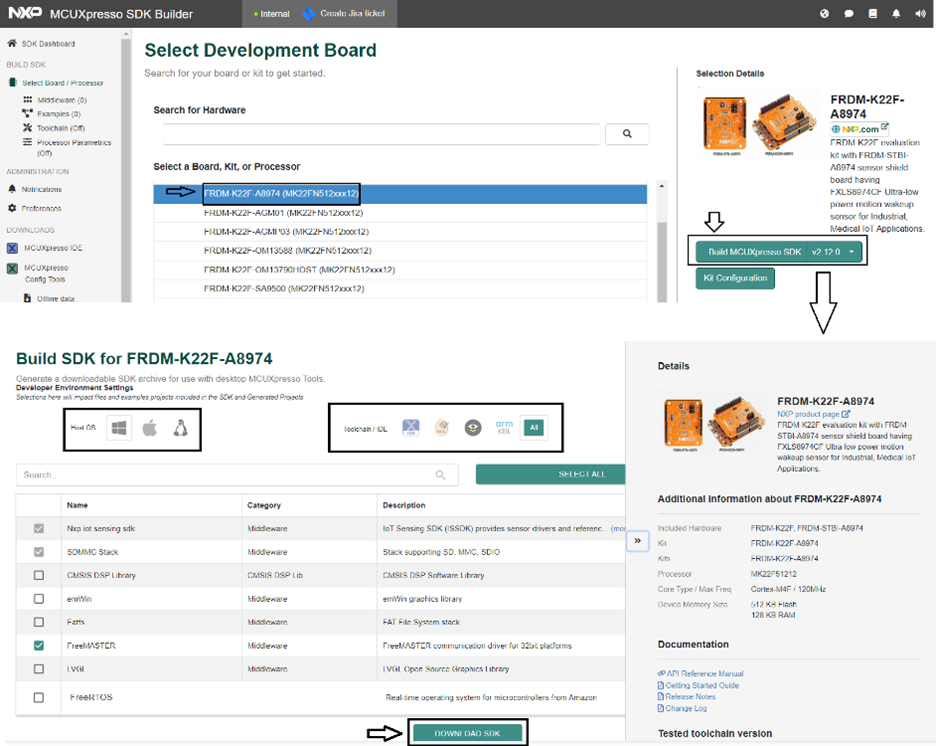
3.1.1 Unzip the Downloaded Package
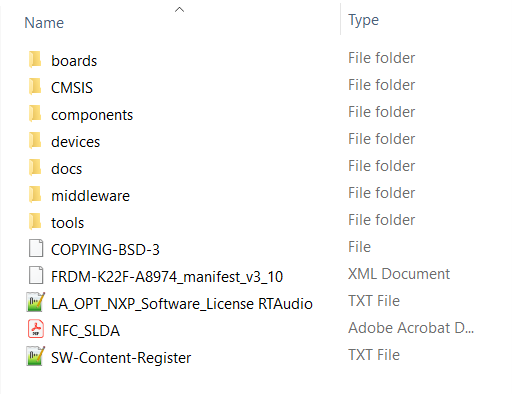
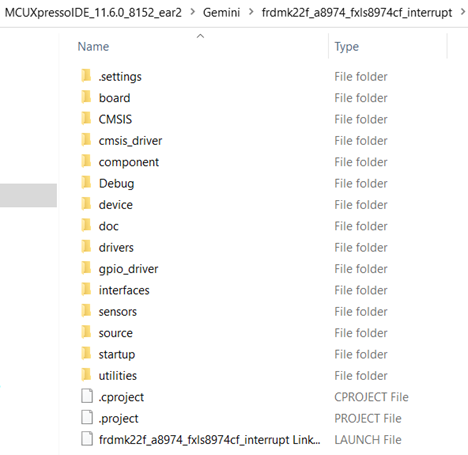
3.1.2 Find the ISSDK Example Sensor Applications
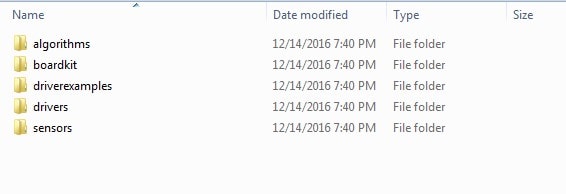
The CMSIS, devices, docs, rtos and tools directories are unchanged from the standard MCUXpresso SDK deployments. The ISSDK folder appears as frdmk22f_a8974 in the /boards directory.
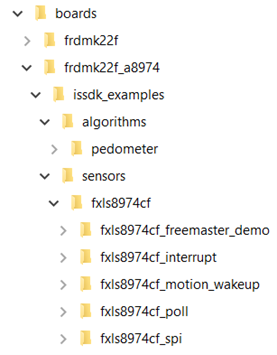
AAs shown above, ISSDK provides out-of-box example projects for the FXLS8974CF sensor. In addition, ISSDK includes algorithms such as Pedometer. These sensor out-of-box example projects are ready to build and run with the FRDM-K22F-A8974 Demonstration Kit.
Note: In addition, a new middleware folder for ISSDK is created containing the ISSDK drivers, algorithms and other support files as follows:
3.2 Build and Run ISSDK Exampless
If one or more of the demo applications sounds interesting, you're probably wanting to know how you can build and run yourself. Let us take "fxls8974cf_interrupt"
out-of-box example available as part of the downloaded SDK package and try running it with our chosen IDE: MCUXpresso.
3.2.1 Install the Downloaded FRDM-K22F-A8974 SDK Package Into MCUXpresso IDE (Simply drag and drop the Zipped SDK Package as it is to the “Installed SDKs” View)
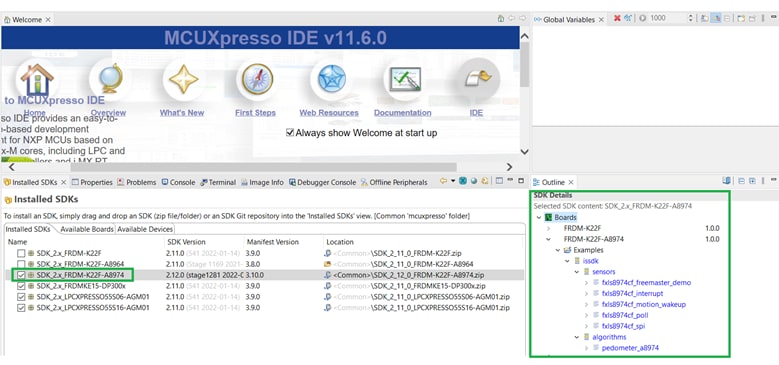
Once the SDK installation is completed, click on ‘Import SDK examples’.
3.2.2 In the SDK Import Wizard, Chose FRDM-K22F-A8974 Demo Kit as the Available Board for Your Project
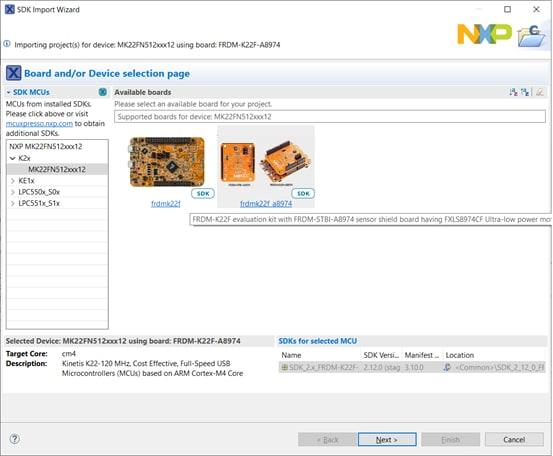
3.2.3 Import any existing ISSDK example from the list of available projects. We have chosen the fxls8974cf_interrupt example:
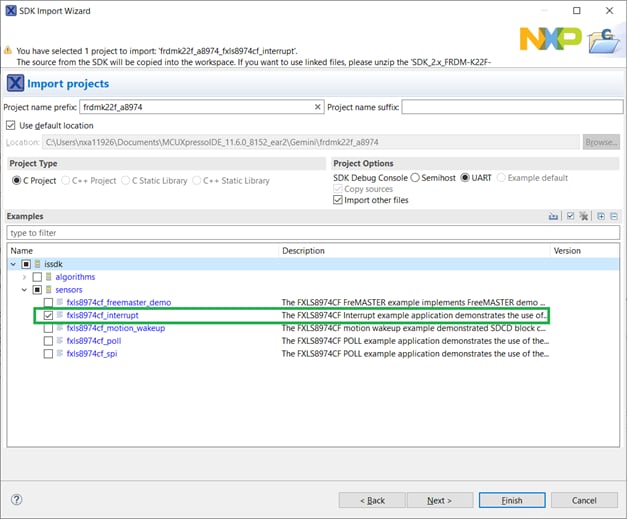
Note: Once, the ISSDK example is imported successfully, the MCUXpresso IDE automatically creates the corresponding standalone project in your workspace.
3.2.4 Build/Run the imported project, loading the firmware to FRDM-K22F-A8974 Kit
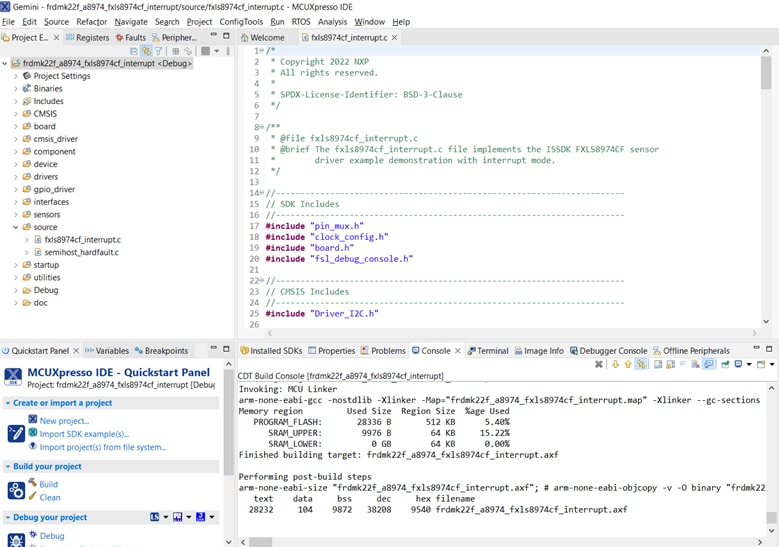
For the firmware to be loaded successfully, review Steps 1.3 and 1.4 to be sure that the MCU board has the latest OpenSDA FW and the PC has the appropriate Windows
Serial Drivers.
The MCU board is now programmed and is ready to output FXLS8974CF sensor data.
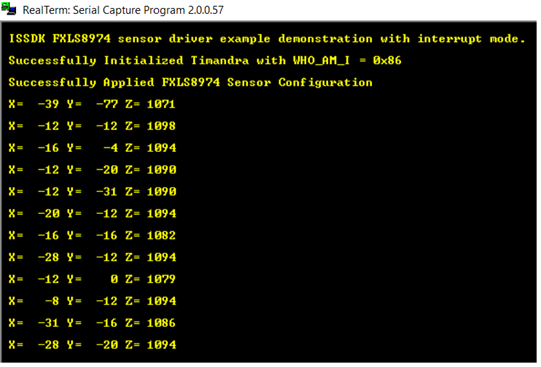
3.3 View the Output
Terminal applications, such as Realterm, TeraTerm, or Putty, can be used to view the sensor output from the board. Refer to the readme.txt file in your workspace
(standalone project) to configure the serial terminal correctly for successful communication with the Demonstration Kit. When the demonstration runs successfully,
gyroscope output samples can be seen on the terminal window.